What does “creating a mind of robot” mean?
ROBOmind-Project
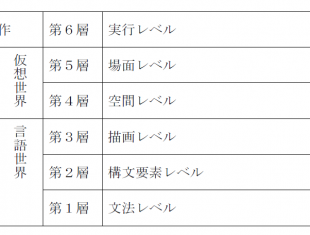
Layout of a mind
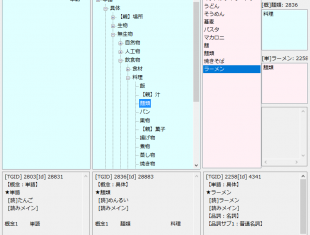
Natural Language Processing
We have explained about “a mind of robot” through tree stories in “What is ROBOmind-Project?”
(If you haven’t read “What is ROBOmind-Pro...