 意識の仮想世界仮説とは
意識の仮想世界仮説とは チューリング・テストと心の仕組み(心のエコシステム)
チューリング・テストと心の仕組み(心のエコシステム)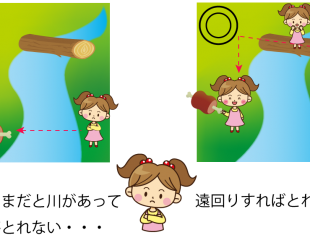 3次元空間を認識するってどういうこと?
3次元空間を認識するってどういうこと? 感情とは 認知パターンって何?
感情とは 認知パターンって何?
【マインド・エンジン】絶対不可能といわれていたコンピュータによる言葉の意味理解。ついに成功したので公開します。

ロボマインド・プロジェクトの提案する意識を持った心のシステムとはどういうものか、以下に条件を書き出してみます。
なお、心のシステムとは、我々人間が持つ心と同じ機能の心を指し、意識は、心のシステムの一つの部品となります。
心のシステムに必要な6つの条件は以下の通りです。
①外部の現実世界を知覚する。
②知覚した現実世界を、内部に仮想世界として構築する。
③意識は、仮想世界を通して現実世界を認識する。
④意識は、仮想世界を操作して、現実世界をシミュレーションできる。
⑤①~④の機能を持つシステムが心のシステムであり、心のシステム同士でコミュニケーションを行う。
⑥心のシステムは、共通の認知パターンを持ち、コミュニケーションで伝えられることは、認知パターンに還元される。
以下に、一つずつ、説明していきます。
①は、目や耳などのセンサーを介して外部世界を知覚することを意味します。
外部にある現実世界を把握するには、何らかのセンサーが必要ということです。
そして、外部の現実世界は、心が、他の心と共有する唯一の世界となります。
②③が、ロボマインド・プロジェクトの最大の特徴となります。
「意識の仮想世界仮説」に書いてありますので、詳しくは、そちらを読んでいただくとして、簡単に説明しますと、意識とは、現実世界を直接認識しているのではなく、内部に現実世界を仮想世界として再構築し、それを介して現実世界を認識するという説です③。
つまり、意識は直接現実世界を認識することはできません。
ただし、意識はそのことに気づかず、外部の現実世界を直接認識していると錯覚しているのです。
なぜ、仮想世界などといった回りくどい方法を取るのかという答えが④になります。
人間は、目の前にあるリンゴを、「今、食べようかな」とか、「明日の朝、食べようかな」などと考えることができます。
これができるには、目の前にないものでも、頭の中で自由に想像できなければなりません。
もし、目の前にある現実世界を直接認識することしかできなければ、目の前の現実世界以外のことを想像することができません。
そこで、仮想世界を頭の中に構築することで、仮想世界上で自由に操作できるようにし、自由に想像できるようにしたのです。
これにより、まだ起こっていない未来を想像したり、既に起こった過去を思い出したりできるようになったのです。
これら①~④の機能を持って初めて、我々人間と同じ意識を持った心となります。
仮想世界を持つ者同士なら、相手の言ったことを、自分の仮想世界上で再構築することができ、これにより、相手の言いたいことを理解し、コミュニケーションが成立するのです。
コミュニケーションが成り立つには、相手の言っていることを理解する必要があり、そのためには、相手が頭の中で思い描いているものと同じものを、自分の頭の中に描けないといけません。
逆に言えば、コミュニケーションできたとすれば、相手は、自分と同じ心のシステムを持っていると言えます。
これの意味するところは、相手に心があるかどうかは、心を持つ者にしか判断できないと言えます。
つまり、心を持つかどうかは、客観的に検出できるものでなく、心のシステムを持った者同士で判断するしかないのです。この心のシステムを持った者同士のことを、「心のエコシステム」(チューリング・テストと心の仕組み参照)と呼んでいます。
これが、⑤の意味することです。
⑥の「認知パターン」とは、感情などのことです。コミュニケーションで伝えたいこととは、こんな嬉しいことがあったとか、悲しいことがあったといった認知パターンに還元されるということです。
同じ心のシステムを持つ者同士は、同じ認知パターンを持ち、相手の言いたいことを理解するとは、どの認知パターンかを推論することと同じだと言えます。
こうして定義した心のシステムを使って、様々なシステムが意識を持つかどうか検証したいと思います。
まずは、最も単純な「サーモスタット」について考えてみましょう。
サーモスタットは、温度の変化でオン/オフする単純な機器です。
このサーモスタットも、外部世界(温度)を検知する機能を持っているので、①はクリアします。
ただ、①以外の機能はすべて持っていないので、サーモスタットは意識があるとは言えません。
当然ですよね。
次は、「犬」について考えてみましょう。
犬は、目や耳を持っていて、外部の世界を知覚するので①はクリアします。
ただ、②の仮想世界は持っていないと思われます。
その理由は、「3次元空間を認識するってどういうこと?」で詳しく説明しましたが、簡単に紹介しておきます。
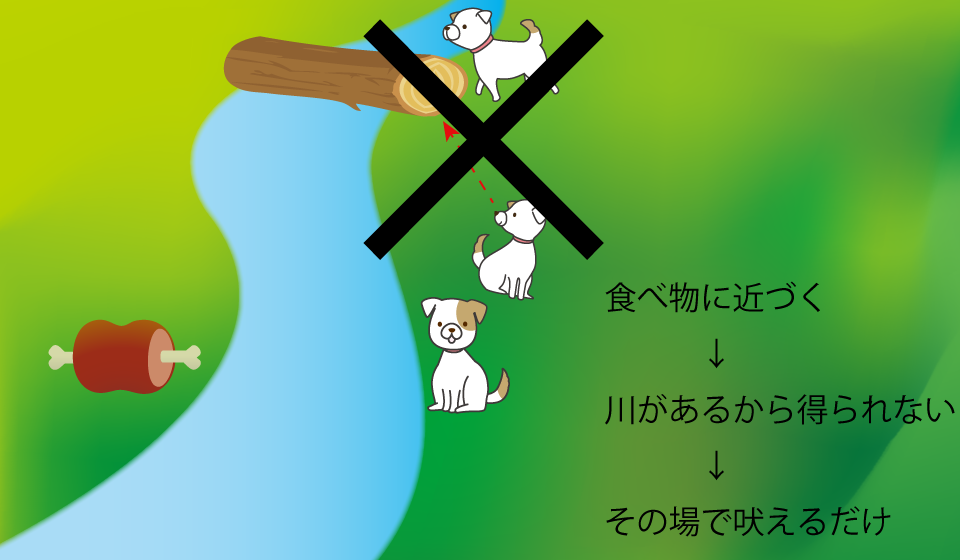
犬は、川の向こう岸に肉がおいてあると、肉は欲しいけれど、川を渡れないので、ワンワン吠えます。
でも、よく見ると、少し離れたところに橋が架かってあって、橋を渡れば、遠回りになるけれど、向こう岸に渡って肉を取ることができます。
ところが、犬は、この橋に気づいたとしても、橋を渡ろうとせず、相変わらず目の前の肉に向かってワンワン吠えるだけです。
なぜかというと、橋を渡るルートを思いつくには、頭の中に地図を思い浮かべなくてはなりません。
これが、現実世界を頭の中で再構築した仮想世界なのです。
仮想世界なので、頭の中で操作することができ、遠回りをしても、橋を渡れば肉に近づけると想像することができます。
ところが犬は、食べ物を見つければ、近づくように移動するというプログラムしか持たないため、橋を渡る方法を想像できません。
この「食べ物を見つければ近づく」というプログラムは、まさに、現実世界を直接認識しているだけのプログラムと言えます。
仮想世界を持ってないので、②~⑤の機能も持てませんので、意識があるとは言えません。
ただ、犬は、肉をもらえれば喜び、自分が食べてる肉を取り上げられれば怒ります。
これは喜びや怒りといった、人間と共通の感情を持っていると言えます。
その意味で、⑥の認知パターンは持っていて、人と共通の認知パターンの範囲では、人とコミュニケーションが可能といえます。
次は、将棋ロボットについて考えてみましょう。
将棋ロボットは、盤面を撮影するカメラと、次の一手を考える頭脳と、考えた次の一手通りに駒を動かすロボットアームを備えているものとします。

将棋ロボットは、現実世界である盤面を検知するので、①はクリアします。
将棋ロボットの頭脳は、何手も先まで読みながら次の一手を考えます。
これができるのは、仮想的な盤面上でいろいろな手を指しながら考えているからです。
つまり、現実の盤面をコンピュータ上で再構築した仮想世界を持ち得ると言えます。
これで②はクリアしたといえます。
将棋ロボットの頭脳は、現在の盤面から、次の一手を考えるわけですから、頭脳が意識する盤面は、単に、カメラで撮影した画像ではなく、画像から駒などを抽出し、仮想的な盤面上に配置したものとなります。
つまり、将棋ロボットの頭脳が認識するのは、現実世界そのものでなく、現実世界を仮想世界に再構築した仮想盤面なのです。
このことから、③もクリアしたと言えます。
また、次の一手を指すのに、仮想盤面上で駒を操作してシミュレーションするので、④もクリアします。
将棋ロボットは、将棋ロボット同士でも対戦できますし、将棋のルールを知っている人間とでも対戦できます。
対戦するとは、現実世界の将棋の盤面を通してコミュニケーションしていると言えますので、⑤もクリアします。
将棋指しなら、将棋のルールだけでなく、将棋の必勝パターンや、戦略パターンなど、共通のパターンを共有しています。
これにより、相手の駒の動きから、相手の考えを読み取ることができます。
これは、認知パターンを通して意思疎通が行われるといえ、⑥もクリアします。
以上のことから、意外なことに、将棋ロボットは意識を持つといえるのです。
意外な結果がでました。
それでは、将棋ロボットと人間の心では、何が違うのでしょう?
それは、現実世界の構造です。
そして、現実世界を再構築した仮想世界です。
将棋ロボットの現実世界は、盤面と40個の駒と将棋のルールだけです。
これだけなので、現実世界をすべて記述することが可能です。
コンピュータ内に再構築する仮想世界も、現実世界を忠実に再現することができます。
ところが、人が生きている現実世界は、もっと複雑です。
様々な物や人がいます。
目に見えない複雑な人間関係も存在します。
これらの現実世界を忠実の再構築することは不可能に近いです。
ただ、仮想世界は、現実世界を忠実に再現できないといけないわけではありません。
我々の目的は、人と自然な会話ができるシステムです。
そのために、相手の言いたいことさえ理解できれば、意味不明な返答はなくなり、意味のある会話を成立させることができるようになります。
現在のチャットボットは、これができないため、会話が続かないのです。
そして、相手の言いたいこととは、認知パターンに還元されます。
つまり、人と自然な会話ができるシステムを構築するには、現実世界を忠実に再構築しなくてもよく、認知パターンを抽出できる程度に現実世界をモデル化し、仮想世界を構築できればいいのです。
認知パターンを中心に現実世界を簡略化して再構築できればいいわけです。
それさえできれば、人と自然な会話ができるシステムが実現できるのです。
AIが、ディープラーニングの次に目指すべきことが明確になりました。
それは、認知パターンを中心とした現実世界のモデル化です。

ロボマインド・プロジェクトの最新情報はYouTubeで!







まるでインドのヴェーダ聖典を読んでいるような錯覚を覚えました。
パラシャラホーラシャストラの創造の章の解説です。
————————————————————————-世界創生の解説—————————
アヴィアクタからヴィアクタへ
パラシャラの言葉
「また一本足にしてヴィアクタ(具象なもの)とアヴィアクタ(非具象なもの)から成るヴィシュヌ、ヴァースデーヴァは誉め称えられる。そのアヴィアクタ(非具象なもの)から成るヴィシュヌは、2つのシャクティ(力)を備えている。
ヴィアクタ(具象なもの)から成る彼は3つの[シャクティ]を備え、無限のシャクティ(力)があるといわれる。サットヴァ(純質)を主体とするシュリーシャクティ(ラクシュミーの力)、ラジャス(激質)という特性のブーシャクティ(大地の力)、
そして3つ目のシャクティといわれるものはニーラ(黒)と呼ばれ、暗黒(タマス)の姿を取っている。」
唯一の実在であるアヴィアクタ(非具象なもの)は、その本性からヴィアクタ(具象なもの)を生み出します。アヴィアクタ(非具象)には2つのシャクティ(サットヴァ性とラジャス性の力)があり、そして、そのヴィアクタ(具象なもの)には、三つの種類のシャクティが存在しているといいます。それがサットヴァ(SATTVA純質)を主体とするシュリーシャクティ(ラクシュミーの力)、ラジャス(RAJYAS激質)という質のブーシャクティ(大地の力)、ニーラ・シャクティ(黒・カーリー女神)と呼ばれる、タマス(TAMAS暗質)です。
古来、これらの宇宙的力は、民衆レベルでは神格化されており、宇宙的力が人格神化されて、ラクシュミー女神やカーリー女神として崇拝されております。しかしここで重要なのは、それぞれの神の名前とされているその音です。(ラクシュミーという音がマントラとして使用される)
占星術において3っつの創造に関与するグナそして五つの元素を説明するためにとても重要な事柄なので、もう少し詳しく説明してみましょう。
アヴィアクタ(非具象なもの)とは、具体的に具象化していない状態を意味します。まず、最初に何も物理的な物が無い状態を想像してみてください。具体的な物はなにもありません。眼に見えるものも、感じる物も、観測できるものも、もちろん変化も時間もない、この具体的な世界もなに無い状態です。
しかし、真性の無から物はできませんから、即物的でも具体的でも何もないのに私たちが認識する具体的な物質や物理エネルギーを生み出す根源のような何かが存在しています。これを、この世の具体的な物と区別して、単に、絶対存在と呼びましょう。何故、存在とよぶかといいますと、これは、目に見えず、観測にもかからず、形も色も匂いもなにもないのに、全ての実存物の根本に“在る“からです。
具体的な物は、アインシュタインの相対性理論を持ち出すまでもなく、全て相対的ですからこの具体的ではない存在を絶対の存在、あるいは絶対界と表記します。
それに対して、ヴィアクタ(具象なもの)とは、この絶対界が相対的な世界(物質とエネルギーの世界)として展開された世界を意味します。
この、唯一のものはこの宇宙の全てを生み出しまたその土台となっています。一つの例えとして、鏡のような水面を創造してみてください。まったく、何の力も働いていない水面は、微動もしません。次に、この水面に風が吹くと、波が現れます。個別の波は、別々の具体的な物に見えますが、実は一つの水です。この水に当たる部分が非具象の存在にあたり、波に当たる部分が具象の現実世界を意味します。
この宇宙は全て唯一の存在の多様な表れであるとヴェーダでは表現します。これを読んでいるあなたも、これを解説している私も、もともと一つなのです。ですが、私たちの意識は普段は波のレベルにあるので、人は自分とは違う波に見えてしまいます。海を見ることはできません。稀に、海を感じる事、人も自分だと感じる人や体験があるかもしれません。
略
純粋知性と具象化
非具象存在の状態を表すとして、サット、チット、アーナンダという説明をしました。サットの永遠不易の絶対存在という言葉は非具象そのもののあり方の表現ですが、チットつまり純粋な知性という性質が具象の原因となる存在に内在するとても重要な性質とし述べられなければなりません。
知性という言葉は、普通は知的な理解能力等を意味しますが、ここでいう純粋知性は、単に知的な理解を意味する言葉ではありません。たとえば、これを純粋感性と読んでも同じです。頭で理解する事柄が知力だとすれば心で感じることもあります。別にいえば、何かがあることに気づくという点で、純粋注意力といってもよいし、気づき、意識といっても良いでしょう。
純粋知性とは、とにかく何かを知る・感じる・気づくための元になる純粋な知る性であるという意味でつかっており、存在はその本質をもっているということです。
さて、サンスクリット語では、この存在の本性としての純粋知性を、性質という観点から表現するときに、プルシャ(純粋知性)という言葉で現します。プルシャにはプラクリティ(自然、女性的な創造エネルギー、プラナ、パラシャラがつかった言葉で言うシャクティ、)と呼ばれる無限のエネルギーが内在していると、ヴェーダではいっております。
人間的に比喩で例えると、創造は、プルシャがそれ自身を経験したいという願望を持ったときに始まります。その願望から分離の感覚が生じます。それがプラクリティ(自然)です。プラクリティは外側に現れた宇宙の母体です。プルシャの意図といってもよいでしょう。
——————————意識の根本原理の解説———–意識はなぜ生まれるか————————————————————
プルシャとは純粋知性であるといいます。プルシャとしての存在を表現したときに、その存在のプルシャとしての本性は知る性です。
存在の本性がプルシャであるならば、つまり知る性であるならば、その純粋知性が知性として働き時に最初に知るものはなんでしょう?それは、知る性質自身が知る性質について知る事です。これは、私達の意識の構造を表しています。
朝、目覚めた時、あなたは自分に気がつきます。この気が付くと言う言葉に注意してください。あなたの神経系統は、休息から目覚める時に働きはじめます。このときに、あなたの心身は、知性を反映し始めます。ちょうど夜明けの明るさから朝日が一条差し込む時に光に気が付くように、知性が少しずつ増し始め、ぼんやりとした意識が生まれます。意識とは、知性が知性自身を知る過程です。なぜなら、知る性だからです。そして、通常の覚醒レベルまで知性が働きだした時には、あなたは目覚めます。自分の意識がはっきりしますね。
プルシャは純粋な知性です。この知性が知性自身の存在を知ります。なぜなら、知性という働きは、その知るという性質上、これが働けばかならず認識をせざる終えないからです。
そして、知性自身の存在を認識します。つまりマハト(大、ブッディ=認識)と呼ばれる、状態が生みだれた瞬間です。あるいはこれが、宇宙の知性・宇宙的規模で起きたときに生まれる意識の過程です。このとき生まれた意識をマハーン(Maham宇宙知性・純粋認識・純粋意識)と呼びます。
そして、このマハーンからマハーンの相対的な具体物としての、また個別の個々の分割されたあるいは抑制・拘束された純粋知性のかけらよりアハンカーラ(Ahamkara自我)が生まれます。つまり、知性が知性自身を認識(ブッディ)したときに、自己を認識します。それが自我と呼ばれるものなのです。しかし、これはそのものではなく、認識にしかすぎません。知性は知性は知性としての存在の本性として存在します。しかし、認識は認識でしかなく、自分という具体的な存在はありません。それは、単に私・私自身・あるいは私のものという思考の様式でしかないのです。
もし、仮にその認識が他人と言うものであれば、他人という幻想が生まれます。ですから、このアハンカーラは、私という幻想と呼びます。私(アイデンティティを確認する自分)と呼ぶとき、それはアハンカーラ(エゴ・自我)を指します。
略
———————特にここ 心の解説——————————————–
具象化の流れ
パラシャラの言葉
「[サットヴァ]性のそれからは神々が、テージャス(ラジャス)性のそれからは感覚器官が、そしてタマス性のそれからは空気など[の五元素]が各々のシャクティによって生じる。
シュリーシャクティを伴なうとき、ヴィシュヌは常に[天空地の]三世界を維持し給う。ブーシャクティによって彼はブラフマンとして創造し、ニーラシャクティによってシヴァとして破壊する。」
リシは、主体を意味していましたが、これは見る側にあたります。パラシャラは「サットヴァ性のそれからは神々が」、と述べていますがこれは、宇宙的レベルで現れた自然法則の主観的な立場を表します。個人の人であれば、何かを意識する主体である私達自身の自我そして、具体的な世界を体験するマナス(心)を意味します。
マナス(心)とは、丁度白いスクリーンに投影された、世界の画像といえます。実際には、この後生じる五感によって集められた、様々なデータで構築された(画像のみならず五感や体性感覚やそれに紐づけれらた感情や感性も含まれる)自分独自の世界です。世界観という言葉を聞いたことあるでしょう。個々の人によって、実は世界は違っています。それは、世界から得られた情報、情報を抽出するフィルターの役をする無意識の知力の偏りや(偏向フィルターのようなもの)の種類や違い、そのベースにある身体を構成する神経系の(タイプや発達段階の違い)や五感機能によって(主に脳神経機能の相違)やシナプスの構成や生育段階の違いによる無数の違った世界観から構成されています。五感から情動まで含めた自分なりの3D世界、個人的認識用 仮想世界といってよいでしょう。50億人の人口があれば50奥通りの世界があります。
「ラジャス性のそれからは感覚器官が」とありますが、対象を認識する五種類の感覚器官を、五感と呼びます。知る過程とは実は、主体と客体を結びつける五感の働きであると言えます。宇宙の本性が知性であるために、それは全て5種類の知る働きとして生まれます。それゆえ、五感は外部の無数無限の情報空間から、特定の情報をフレームとして切り出す器官ともいえます。
「タマス性のそれからは空気など[の五元素]が」とありますが、これが客体として存在物です。私達の肉体を構成する物質にあたります。
——————————————————————————
コメントありがとうございます。
インド哲学は、あまりなじみがないですが、たしかに近いところはありそうですね。
心のシステムの条件が6つありましたが、いずれも感銘を受けました。
ただ同時にこの条件は、入力内容(知覚内容)から外界の認識を構成することには寄与すると思いますが、認識した内容をいかに評価して、外界にどのような出力(具体的な行動など)をするのか決定するには至らないようにも感じました。
人間に近い心のシステムを構築するには、認知パターンを同様にするとともに、認知した内容への評価も同様なものにする必要があるかもしれません。
コメント、ありがとうございます。
おっしゃる通りです。
このシステムでできることといえば、認知パターンに当てはめて、「嬉しい」に該当すると「嬉しい」と返答するだけの単純な会話だけです。
現段階では、意味を理解できる最低限のシステムを想定しているので、こうなっていますが、現実的な会話を考えると、認知した内容を評価して、さらに会話を続けるといった機能が必要になりますね。
次の段階では、必須の機能といえます。