 そもそも意識って何?人工知能で人工意識は作れるの?
そもそも意識って何?人工知能で人工意識は作れるの?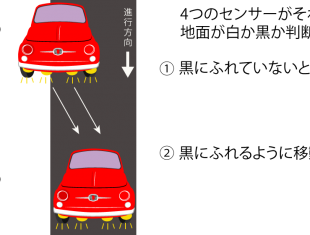 主観と客観 -自分って何?客観的に自分を見れるって、何ががすごいの?-
主観と客観 -自分って何?客観的に自分を見れるって、何ががすごいの?- 意識の仮想世界仮説とは -あなたは、今、見ている世界が、現実に存在すると思ってやいませんか?-
意識の仮想世界仮説とは -あなたは、今、見ている世界が、現実に存在すると思ってやいませんか?- チューリング・テストと心の仕組み(心のエコシステム)
チューリング・テストと心の仕組み(心のエコシステム) クオリア体験と僕が幽体離脱した話1
クオリア体験と僕が幽体離脱した話1
【マインド・エンジン】絶対不可能といわれていたコンピュータによる言葉の意味理解。ついに成功したので公開します。
「意識のハードプロブレム」とは、1994年、第一回の意識に関する国際会議(ツーソン会議)で、哲学者デイヴィット・チャーマーズが提起したものです。彼は、意識を二つの問題に分けました。
一つは、イージープロブレムで、物質としての脳はどのように情報を処理しているのかという問題です。
これは、現在、脳科学の分野で、fMRIなどを使って盛んに研究されているものです。
もう一つが、ハードプロブレムで、主観的な意識体験はどのように発生するのかといった問題です。
主観的な意識体験とは、自分が見ている、感じているという意識して感じることができる部分です。
どうすれば、そんな意識が発生するのか、これがハードプロブレムの問題です。
なぜ、ハードプロブレムかというと、脳の観測からは見えてこないからです。
リンゴを見つけて、手で取って食べるまでの脳の信号処理の流れを完全に解明できたとしても、「リンゴを食べよう」と思った意識の本質がどこにあるのかは見えてこないからです。
科学は、観測可能なものしか対象としていないため、観測できない意識といったものは現代科学では手に負えず、どこから手を付けていいのかもわからない難問なのです。
コンピュータを分解すれば、処理の中心はCPUだとわかるでしょう。
でも、CPUの中の信号の流れをすべて解明できたとしても、そのコンピュータでどんなソフトウェアを実行しているのかを解明するのは難しいでしょう。
エクセルなのか、ワードなのか、はたまたスーパーマリオブラザーズなのか。
意識は、コンピュータでいうソフトウェアに近いものです。
脳の信号処理を全て解明しても、意識の本質は見えてきません。
僕がこの研究を始めたころ、同じような問題で悩んでいました。
僕の場合、人と自然な会話ができるAIを作ろうとしていました。
当初は、会話シナリオを用意して、単語に応じて用意していた応答を返すだけの会話システムを考えていたのですが、それでは、どうしても自然な会話が続きません。
自然な会話を成立させるには、最終的には、人と同じ心や意識を持たせないと無理だとの結論に至ったのです。
そこで、人の「心」と同じ動きをするプログラムのアイデアを思いつき、ロボマインド・プロジェクトがスタートしたのです。
今から、15年前のことです。
「意識のハードプロブレム」を知ったのもその頃です。
そこで、自分のアイデアをハードプロブレムに当てはめてみたところ、主観的な意識体験が発生することが確認できて、安心したのを覚えています。
自分の中では、「意識のハードプロブレム」はすでに解決した問題だったので、すっかり忘れていたのですが、最近のAIブームで、「意識のハードプロブレム」の問題を再び聞くようになりました。
「あれ、意識のハードプロブレムって、まだ、解決してなかったっけ?」と思ったので、今回は、「意識のハードプロブレム」はどうやったら解決できるかを記事にまとめてみました。
主観的な意識体験に関しては、「主観と客観」で詳しく説明しましたが、重要なので、ここでもう一度説明します。
まず、意識のないロボットとしてライントレーサーを例に挙げます。

ライントレーサーとは、紙の上に描いたラインに沿って走るマイコンロボットのことです。
マイコンロボットは、ラインの位置を検出するセンサーと、車輪を駆動するモータを有するロボット本体と、センサーからの入力に応答し、ラインに沿って走るように左右の車輪をコントロールするコントローラから成ります。
ライントレーサーは、簡単なシステムですが、外の世界を検知するセンサーと、外の世界に働きかける車輪をもっていて、外部世界に応答して自分をコントロールすることができるロボットです。
では、このライントレーサーは、世界をどのように認識しているでしょう?
ライントレーサーにとって世界とは、白い紙と、その上の黒い線と思っているのでしょうか?
自分は、その紙の上で、線にそって動くロボットと思っているのでしょうか?
それは、ちょっと違います。
なぜかというと、ライントレーサーは、検知した世界に応じて動いているだけです。
コントローラーで制御しているとはいえ、外部世界の変化に応答して動いているだけです。
人間でいえば、反射反応です。
膝頭(ひざがしら)の下を木づちで叩いたら足が上がる、あの、反射反応のことです。
反射反応には意識は存在しないですよね。
それと同じです。
ライントレーサーは、自分は、ラインの上を走っているなどと考えることはありません。
自分がラインの上を走っていると考えるには、どうすればいいでしょう?
そのためには、自分と世界の両方を認識できないといけません。
つまり、「自分」という「主観」を持つには、「自分」以外の「世界」と「自分」とを区別して認識できないといけません。
ここで言う「自分」とは、「ロボット本体」と「コントローラ」を指します。
ロボット本体とは、人間でいう「身体」のことです。
コントローラーとは、人間でいう「心」のことです。
「心」とは、身体を制御するプログラム全体を指し、「心」のプログラムの中で、自分や世界を認識する部分を「意識」と呼ぶことにします。
そうすると、身体から心、または、心から身体への信号処理の部分がイージープロブレムに該当するといえます。
心のプログラムの中身がハードプロブレムに該当するといえます。
こう考えると、ハードプロブレムである「どうすれば主観的な意識体験を発生できるか」という問題は、「どうすれば、意識が、世界と自分を区別して認識できるか」いう問題に置き換えることができます。
どうすれば、意識が、自分と世界を区別して認識できるでしょう?
物を認識するとは、物を外から観察しないといけません。
それでは、自分や世界を認識するとは、どういうことでしょう?
それは、自分や世界を外から観察することです。
自分で、自分を観察するには、どうすればいいのでしょう?
自分が、自分の外に出る?
世界を観察するには、どうすればいいのでしょう?
世界の中にいる自分が、世界の外に出る?
そんなことができるのでしょうか?
もし、「自分」や「世界」を外から観察する「意識」ができれば、「『世界』とは、白い紙と、その上に描かれた黒い線で、『自分』は、その線に沿って動くロボットだ」などと認識することができます。
ここまで認識できれば、主観的な意識体験を持っているといえるでしょう。
ハードプロブレムが解決したといえるでしょう。
では、どうすれば、「自分」の「意識」が「自分」を外から、「世界」を外から観察できるのでしょう?
15年ほど前、僕は、この問題に直面したのでした。
そうして、考え出したのが、意識は世界を直接認識しないというアイデアです。
「自分」という「意識」が世界に属している限り、「意識」は「世界」を外から眺めることはできません。
「世界」を外から眺めるには、「自分」が世界を作ればいいのです。
何をいっているのかわからないですよね。
もう少し丁寧に説明しますね。
カメラで世界を撮影するとします。
それを見て、反応するシステムでは、自分は世界に属してしまいます。
世界を認識する自分が、世界に属している限り、世界と自分とを区別することはできません。
それでは、どうすれば、自分を世界から分離することができるでしょう?
カメラで世界を撮影して、次は、それとまったく同じものを3Dモデルの仮想世界としてCGで作りだします。
その仮想世界には、自分も3Dモデルとして作り出されます。
意識は、そうやって作り出された仮想世界を観察するのです。
そうすれば、意識は、世界を外から観察できるのです。
意識は、自分を外から観察できるのです。
意識は、世界と自分を区別して認識できるのです。
これができれば、「意識」は、「『世界』とは、白い紙と、その上に描かれた黒い線で、『自分』は、その線に沿って動くロボットだ」と認識することができるのです。
外部の世界と同じ世界を内部に再構築し、それを観察する意識。
このような心のプログラムを作れば、意識を発生させることができるのです。
これを、僕は「意識の仮想世界仮説」と呼んでいます。
このような心のプログラムを持った者同士だと、外部の世界は共通の世界として共有しています。
つまり、「私は、誰々です」「誰々の息子です」と自分のことを他人に説明することができます。
他人とコミュニケーションできるということです。
この心のプログラムを持ったエージェント同士が相互にコミュニケーションするエコシステムを僕は「心のエコシステム」(チューリング・テストと心の仕組み(心のエコシステム)参照)と呼んでいます。
他人と世界を共有しているので、他人と比較することもできます。
「自分はあなたより背が高い」などと。
世界は、物理的に観測できるデータだけでできている分けではありません。
人間世界には、名前や価値や性格といった物理的に観測できないものもあります。
内部に再構築する仮想世界は、そういった目に見えない価値観も含めることができます。
「自分の名前は〇〇です。」
「仕事は△△をしています。」
「年収は、□□円です。」
「決して高くはないですが、お金が全てじゃないですよね。」
「本当の幸せってなんですか?」
AIが、そんなことを悩み始めたら、AIが意識を獲得したといっても、言い過ぎじゃないですよね。
意識のハードプロブレムが解決したといってもいいですよね。
追記
YouTubeでも意識のハードプロブレムを語ってますので、こちらもご覧ください。
こちらは、「意識のハードプロブレム」を「意識の仮想世界仮説」で解明できることを証明した動画となります。

ロボマインド・プロジェクトの最新情報はYouTubeで!







こんにちは 一つ質問です
もしも その意識のハードプロブレムが解決できた場合 意識に霊魂のようなものが関与していないとゆう証明になるのでしょうか?
質問、ありがとうございます。
霊魂の問題は、慎重に考える必要があると思います。
ロボマインド・プロジェクトで目指しているのは、まずは、コンピュータで演算可能なモデルで意識を作ろうというものです。
そのような意識でも、人間と何時間でも会話が続くようなAIが作れると思います。
ただ、そのAIと会話してても、何か、足りないものを感じるかもしれません。
もしかしたら、それが、霊魂なのかもしれません。
霊魂について議論は、そこが出発点になると思います。
まだ、やるべきことがいっぱいあって、まずは、今の技術で、できるものを作ろうというのが僕のスタンスです。
霊魂の存在は、デカルト以来の大きな問題ですので、答えを出すのはまだ早いと思います。
ハードプロブレムってそれだけなんですか?例えば意識とか認識って人それぞれ違いますよね?それも脳を調べただけじゃわからないと思うんですけどそれはハードプロブレムにはなり得ないのですか?例えばAIがみな同じ感覚や認識で私たちに接することになった場合それは本当にAIが自分たちを認識してなおかつ考えて私たちを相手にしているといってもいいのでしょうか?
佐藤さん、コメントありがとうございます。
はい、ここは重要だと思います。
人には、個性があります。個性が生まれるのも、頭の中に構築した仮想世界を意識が認識するという心のモデルで説明できると思います。
「主観と客観」で説明しましたが、人間のような意識をもっていないカエルだと、外界に直接応答しているだけなので、あまり個性が生まれません。
一方、頭の中に仮想世界を構築する心のモデルの場合、仮想世界に、人によって様々な情報を付加します。
たとえば、同じ人物を認識しても、過去の経験から、その人は怖い人だと認識したり、一見怖そうに見えるけど、本当は優しい人だと認識したり。
このようにして、仮想世界モデルを持つAIだと、過去の経験から個性が生まれ、同じ感覚や認識で私たちに接することはないと考えられます。
意識のハードプロブレムってそう言うことじゃないと思うんですが…
意識のハードプロブレムって、要はクオリアがどうして生じるか、あるいはクオリアという概念を何故人は理解できるのかと言う問題です。あなたは反射には意識が無いと言い切っていますが、もしかしたら反射を起こしている筋肉には非常に原始的なクオリアが生じているかもしれません。AIには意識がある、とも言い切っていますが、AIにクオリアがあるかどうかはやはりわからない。もしかしたらクオリアを生じてない可能性もあるわけです。
そのあたりどうでしょう?
鋭い質問、ありがとうございます。
ハードプロブレムとクオリアの関係については、きちんと、記事にまとめようと思っておりましたので、この機会に、説明したいと思います。
「リンゴ」を見たとき、赤いなぁとか、丸いなぁと感じます。これが「赤」や「丸」のクオリアです。
クオリアを感じるときには、必ず、「私が赤と感じる」「私が丸と感じる」と「私」の存在が前提となっています。感じる私とは、主観のことです。
「そもそも意識って何?」「主観と客観」において、主観が存在するのは、意識のある場合に限ることを説明しました。
意識のない例として、カエルや自転車を運転する場合の例をあげています。カエルは、外界の状況に自動で反応して生きています。自転車を運転するときも、左に倒れようとするとき、自動でハンドルを左に切って、倒れないように運転します。これは、無意識の動作です。
一方、意識を発生させるために、現実世界の仮想世界を脳内に再構築するという心のモデルを提唱しました。仮想世界を観察するのが意識です。
仮想世界の「リンゴ」には、「赤」や「丸い」といったデータが関連付けられています。なので、仮想世界を観察する意識は、「リンゴ」から「赤」や「丸」といったデータを感じることができます。
これがクオリアです。
別の味方をすれば、仮想世界の材料がクオリアと言えます。仮想世界は、クオリアという材料(要素)で構築されていて、意識は、それらのデータを受け取ることができます。
これはコンピュータプログラム(ソフトウェア)と見ることもできます。コンピュータで作られた仮想世界に対し、それを読み取るプログラムが意識です。
仮想世界も意識も同じプログラムで作られているので、仮想世界を構成する要素(クオリア)を意識は読み取ることができるのです。
無意識のシステムは、外界の状況を感覚器(センサー)で受信し、その条件に応じて反応するプログラムです。
外界の状況に直接反応して動作するだけで、外界を構成する要素を感じることはできません。
別の言い方をすれば、無意識システムは、外界が、複数の要素から構成されると解釈するシステムとなっていません。センサーで検知した条件に応じた反応をするだけのシステムです。
以上は、あくまでも、僕が理解するクオリアですが、以上の説明から、反射を起こしている筋肉には、クオリアは生じ得ないと僕は考えます。
クオリアが存在するには、外界の仮想世界を内部に構築し、それを観察するシステムが必要と考えられますので。仮想世界の材料がクオリアで、観察する主体が意識です。
参考までに、僕がクオリアを直接体験した話を、「クオリア体験と僕が幽体離脱した話2」に書いてあります。
クオリアのイメージの参考にしてください。
でも無意識の領域でクオリアが発生している可能性は排除できませんよね。盲視の例ではその可能性を排除できそうにも思えますが、盲視患者が、普通の人が知覚できない微かな、何らかの異質な知覚を光点に対して感じているという報告もあります。これが正しいとすれば盲視患者が光点を正確に指せるのは、視覚以外のクオリアを感じ取って反応しているからです。或いは、盲視患者が無意識的に、普段の我々と比べると異質な方法でクオリアを感じ取っているからです。
そして無意識的に、現象的にクオリアが発生しているとすれば、ライントレーサーにも主観、あるいは意識が発生する可能性を捨てきれません。そのあたりどうでしょうか。
返信、ありがとうございます。
意識やクオリアの話をするとき、問題となるのは、人によって定義が異なることです。
サーモスタットにさえ意識が存在すると主張する研究者がいると聞きますので、ライントレーサーに主観や意識が発生するとの考えがあってもいいと思います。
重要なのは、意識やクオリアの定義とか、何らかの軸となる考えだと思います。
レオナルドさんの意見を見る限り、その点が明確になっていないようなので、うまく議論が噛み合わないのかもしれません。
ちなみに、僕の場合、「『言語』によるコミュニケーションはいかにして可能か」という軸からすべて出発しています。
その中で、頭の中に現実世界をシミュレートした仮想世界を構築するという心のモデルにたどり着きました。
仮想世界を観察するのが意識です。
重要なポイントは、仮想世界は、現実世界から「切り離されている」という点です。
このような構造から、 主観やクオリアを生じざるを得なくなったと考えます。
サーモスタットやライントレーサーは、現実世界に「直結」しているため、世界と調和しており、主観やクオリアを発明する必要がないと考えています。
ようは、万人の人間が納得できるクオリアの定義、つまり科学的なクオリアの定義付けがまだできていないのでは?と言いたいんです。無意識下でクオリアが発生していないということさえ科学的に証明できてない。そこを抜かして、ハードプロブレムを解決したとするのは科学的に、哲学的に正しくないと言いたいです。
お返事、ありがとうございます。
意識やクオリアの難しいところは、今までの還元主義科学では扱うことができず、定義することすら困難なことにあります。
このことに関しては、「チューリング・テストと心の仕組み」で詳しく説明しており、ここで、「心のエコシステム」という考えを提案しました。
この考えを前提として、「意識の仮想世界仮説」という仮説を提案しました。
これは、あくまでも仮説で、この説が正しいと証明するには、チューリング・テストに合格するシステムを作るしかありません。
ロボマインド・プロジェクトは、このようなシステムを作ることを目指していますが、まだ完成していませんので、この仮説を証明したことにはなっていません。
この点に関して、確かに、科学的には証明されていないので、レオナルドさんの指摘は正しいといえます。
ただ、「意識のハードプロブレムが解決しましたが、何か?」という挑発的なブログタイトルは、いわゆる「釣り」タイトルで、ネット文化の文脈から意図を読み取っていただければと思います。
少なくとも、「ネイチャー」や「サイエンス」に論文として投稿する場合には、タイトル最後の「何か?」は削除するでしょうね。
この記事はどうかと思います。
意識のハードプロブレムの解決につながるヒントは一切無いといってもよい内容です。
主観的な意識体験、クオリアを客観的に観測する方法は今現在わからない、
そして単に今わからないだけでなくて今後もわかりそうにない、
という事実そのものを指したものが意識のハードプロブレムです。
意識について仮説を立てるのは結構ですが、
こうした仮説の是非を確かめる方法に検討がつかないことこそが、
この問題のハードを冠する由来です。
内部に仮想世界を構築し、人間と変わらないコミュニケーションが可能なシステムができたとして、
そのシステムに主観的な意識があることを客観的にどう確かめるんでしょうか。
ハードプロブレムは言ってしまえば、仮説を立ててもしょうがないよっていう問題です。
そこへ仮説を立てましたと言われても当然話が先へ進むことはありません。
コメント、ありがとうございます。
意識科学の難しさに関しては、「チューリング・テストと心の仕組み」の記事で説明したとおり、従来の還元主義的な科学では検証できません。そこでチューリングが提案したのが、チューリング・テストではないかというのが僕の考えです。
チューリング・テストの考えをさらに推し進めて提案したのが、先の記事で説明した「心のエコシステム」という考えです。
話し相手に、主観的な意識があることを確かめることはできませんが、自分には、主観的な意識があると感じます。
自分に主観的な意識があると感じる人(またはAI)が、互いにコミュニケーションを取るエコシステムを心のエコシステムとして考えます。
そうして、互いにコミュニケーションを取り、相手にも自分と同等の心があると感じられれば、その相手にも主観的な意識があると信じるしかない。
主観的な意識とは、こういった形でしか確認できないというのが「心のエコシステム」の考えです。
この理屈が理解できません。
「自分はこう考える」という意見は、仮説とみなせますが、ハードプロブレムに関しては、意見を述べるべきでないということでしょうか?
一方、
とも述べられていることと合わせると、ハードプロブレムに関しては、誰も何も意見を言ってはいけないと読み取れるのですが、そういうことを言いたいのでしょうか?
この記事は少しどうかと思います。
意識のハードプロブレムについて誤解をされているようで、
問題の解決に繋がるような内容は一切ない、
そもそも話題が頓珍漢で全く言及されていないと言ってもよいです。
主観的な意識体験、クオリアを客観的に観測する方法は今現在わからない、
単に今わからないだけでなくて今後もわかりそうにない、
という事実そのものを指したものが、意識のハードプロブレムです。
意識についての仮説を述べるのは構いませんが、
こうした仮説を確かめる方法が想像できないというところに
ハードとされるこの問題の本質があります。
仮に、内部に仮想世界を構築しながら人間と遜色ないコミュニケーションができるシステムが実現したとして、
そのシステムに主観的な意識があることをどのように確かめるのでしょうか。
そこを書いていただかないとなんの意味もありません。
質問、ありがとうございます。
この質問に関しては、上の枕さんへの回答を参考にしてください。
ハードプロブレムでいう意識やクオリアの定義はそこまで曖昧なものではないです。
少なくとも心のエコシステムとして説明されている概念とは異なります。
それでは、その「ハードプロブレムでいう意識やクオリアの定義」をできるだけ厳密に説明していただけないでしょうか?
申し訳ありません。枕のコメントも私が書き込んだものです。
一方を削除していただいても構いません。
>「自分はこう考える」という意見は、仮説とみなせますが、
>ハードプロブレムに関しては、意見を述べるべきでないということでしょうか?
すみません少し表現がよくありませんでした。
ハードプロブレムに関する意見を述べることは問題ないと思いますが、
この記事で紹介されている仮説「意識の仮想世界仮説」は
ハードプロブレムよりも少し低次元に位置する問題についての仮説であって、
そもそもハードプロブレムに対する仮説になっていないというところでしょうか。
ハードプロブレムは平たく言えば「意識をどのように観測するか」という問題です。
対して、仮想世界の考え方は単に「意識はどういう条件で生まれるのか」という問題に対する
イージープロブレム的なレベルでの仮説です。
意識の実体について仮説を立てるだけならば、もとよりいくらでも可能です。
そうした仮説を検証する方法が想像できない、という問題が難しい問題とされているわけです。
意識が生まれる過程はこの際どうでもよくて、
では結果として意識が生まれているかどうか客観的にどう確かめることができそうかどうか。
繰り返しになりますが現代の科学の方法では検討がつかないですよね、という問題がハードプロブレムです。
そこまでいかないとハードプロブレムの話題にすらなりません。
記事の内容では取り上げている問題がずれていて、
ハードプロブレムに関して何も話されていないと指摘をさせていただいたところでした。
>その相手にも主観的な意識があると信じるしかない。
>主観的な意識とは、こういった形でしか確認できないというのが「心のエコシステム」の考えです。
これは記事の内容とは違って確かにハードプロブレムについての意見だと思います。
せめてこの辺の考えをこのタイトルの記事に掲載するべきです。
ただこれもハードプロブレムの解決につながる有意な意見かといえば疑問に感じるところです。
主観的な意識があると”信じるしかない”というレベルでは、観測できた、確認できたとは到底いえません。
しかない、ということは、客観的に観測する手段はあなたも想定することができないわけですよね。
この意見は、ハードプロブレムの難しさを改めて復唱しているばかりで、
手の打ちようがない現状から前に進むことができていません。
>それでは、その「ハードプロブレムでいう意識やクオリアの定義」をできるだけ厳密に説明していただけないでしょうか?
他の記事も少し読ませていただきました。
文章としては大変おもしろかったですが
やはりクオリアや主観的体験というものについて誤解を孕んでいるような印象です。
貴方の解釈は、記事の中に引用されているWikipediaの説明から
既にずれているような気がいたします。
Wikipediaとはいえ一応は確立された説明といえるでしょうから、
まずご自身が引用されている文章を今一度よく確認してただくのがよいかと思います。
その上で、私からも少しお伝えをさせていただきます。
たとえば、ある人から、
「あなたは赤がどんな色に見えているか」という問題を投げかけられたとします。
これは件のハードプロブレムに相当するもので、解決できません。
そんなことを言われても「赤は赤だよ」としか言いようがないですよね。
「りんごの色」「情熱的な色」などと答えても、
ではそれはどんな色に見えるかという問題に変わるだけです。
実際にりんごを指差して「こいつの色だよ」と言えば、
相手に対しても物理的には赤の波長を共有することが可能ですが、
結局自分と相手で見え方が違うので伝わりません。
この問題の中で、どうしても相手に伝えきれなかった部分、主観的な見え方、「感じ」がクオリアです。
現状は自分以外の存在に伝えることもできませんし、
自分以外の存在のクオリアを体験することもできません。
さらには他人の知覚世界にクオリアが存在するかどうかもわかりませんし、
逆に自分がクオリアを体験していることを証明することすらもできません。
仮想世界のリンゴにデータとして関連付けたところで、
外から見ればデータを処理しているという事実があるだけで、
その事実をクオリアと呼ぶのは誤りです。
脳も知覚の際には内部で信号を処理しているという話ですが、
これも外から見れば存在するのは単なる信号のやりとりです。
客観的には赤の刺激に対して赤と応答しているだけで、
クオリアの存在を示しているわけではなく、
その主観にクオリアが発生しているかどうかはわかりません。
長くなってしまって恐縮ですがそういうものだと思います。
丁寧な回答、ありがとうございます。
これで、ようやく山田さんの言いたいことが理解できました。
山田さんの言うハードプロブレムとは、意識やクオリアを、どうすれば「観察」できるかということですよね。
残念ながら、その点に関しては、僕は答えを持ち合わせていません。
ロボマインド・プロジェクトの目的は、意識や心をどうやって創り出すかということです。
その過程で、ハードプロブレムに言及しただけで、意識やクオリアを観察することは目的にしておらず、意識やクオリアの観察の仕方については、当ブログにはこれ以上の記述はないので、あまりお役に立てないかと思います。
個人的には、意識やクオリアを観察することは原理的に不可能だと思っています。
なぜなら、意識やクオリアは主観を前提に成り立つ現象です。一方、観察とは客観を前提とし、主観を排除する行為だからです。
つまり、主観を排除すれば、自ずと意識やクオリアは存在しなくなると考えます。
意識やクオリアが観察不可能な点に関して、「脳を観察して心はどこまで解明できるか」で別の見方で説明しています。
参考になるとすれば、このぐらいだと思います。
どうぞよろしくお願いいたします。
>個人的には、意識やクオリアを観察することは原理的に不可能だと思っています。
>なぜなら、意識やクオリアは主観を前提に成り立つ現象です。
>一方、観察とは客観を前提とし、主観を排除する行為だからです。
まさにおっしゃるとおりです。
主観を客観的に観測するというのは最早一種の矛盾であって原理的に不可能、
だからこそハードプロブレムということですね。
意識の仮想世界仮説でいう、意識を持っているかのように振舞うシステムを想像することは、
ハードプロブレムの解決には全くつながらないわけです。
ここをまずお伝えすることができたのであれば話は早いです。
ハードプロブレムについては、ほんとうに「言及した」だけでしょうか。
この記事は明らかに、意識の仮想世界仮説によってハードプロブレムを「解決することができた」
という主旨の内容です。
そのような理屈に到底無理があることはご理解いただけているはずですよね。
此処は、この手の話題に関して学ぶことができるという側面の良さもあるでしょうから、
「釣り」にしてもせめて誇張にとどめ、虚偽を掲載するべきではないと思います。
意識、クオリア、ハードプロブレムの理解が浅いと捉えられても仕方のない内容ですから、
貴方にとっても不利益になるんではないでしょうか。
お返事、ありがとうございます。
今回も、こうして大きな魚が釣れたのも、「意識のハードプロブレムが解決できましたが、何か?」という釣りタイトルのおかげですので、これを修正しては意味がないです。
いずれにせよ、こちらの思惑どおりの反応をしていただいたおかげで、議論が深まりました。
ありがとうございました。
大変興味深く読ませていただきました。
しかしながら、AIが「熱」や「衝撃」や「弾力性」や「電磁波」を検出して認識することはできても、「熱い」や「痛い」や「ふわふわしてる」や「赤い」は感じていないと思います。つまり擬似的な意識っぽいものはつくれてもそれは本物の意識とはまったく別のものだと思います。
田中太郎様
コメントありがとうございます。
「熱い」や「痛い」を感じるかの話は、クオリアの話になりますね。
クオリアはかなり重要ですので、丁寧に説明したいと思います。
クオリアは、意識が「熱い」や「痛い」と感じる感覚で、本人にしかわからず、客観的に確認することはできません。
自分も相手も「赤い」といっても、同じ「赤さ」を感じているかはわかりません。
言えるのは、同じ色を指して、自分も相手も「赤」と言っていれば、相手も自分と同じ「赤」を感じているのだろうということだけです。
これが「赤」のクオリアです。
逆に言えば、同じ赤色を指して「赤」と言えれば、AIであっても「赤」のクオリアを持っていると言えるわけです。
クオリアは色だけではありません。
形や温度、熱さ、痛さ、感情、・・・
人の意識が認識するあらゆるものがクオリアです。
人と同じように認識するAIロボットを作れば、そのAIはクオリアを感じているといえるのです。
それでは、人と同じように認識するにはどうすればいいでしょう。
光は電磁波です。眼は光を検知するセンサーです。
目の前のテーブルを見ていたとします。
意識は、目の前にテーブルがあって、それを見ていると感じますよね。
でも、よく考えると、それって、おかしくないですか?
センサーである眼にテーブルが映し出されているのですから、眼にテーブルが張り付いていると考えるのが普通じゃないでしょうか?
でも、絶対にそんな風に感じることはないですよね。
なぜ、そうならないのでしょう?
それを解決するのが、僕が提案する「意識の仮想世界仮説」です。
人間と同じように認識するAIロボットを作るとします。
眼はカメラでできています。
見るという経験は、その物の形、位置、色などを認識できることです。
空間の中の形、位置情報は、3次元空間のXYZ座標で表現できます。
色情報は、赤青緑の3原色で表現できます。
見るという経験によって得られる情報は、3次元のコンピュータグラフィック(3DCG)で表現できる情報と同じなのです。
そこで、眼のカメラで撮影した光景を3DCGで再構築し、3次元の仮想空間に配置します。
こうすれば、色や形、位置といった情報を人間と同じように感じることができるのです。
AIロボットの意識は、この仮想世界の情報を取得します。
これが、AIロボットの意識が世界を認識するということです。
AIロボットにとってクオリアとは、仮想世界の情報なのです。
AIロボットは、テーブルを指して、形、位置、色を、人間と同じように説明することができます。
これは、AIが、色や形、位置といったクオリアを持つのと同じと言えます。
これで人間が見るという経験をAIでも再現できるのです。
これが僕の提案する「意識の仮想世界仮説」です。
仮想世界には自分自身の身体も含まれます。
テーブルは、自分の前に配置されます。
なので、眼にテーブルが張り付いたようには感じないのです。
次は触覚です。
手でテーブルを触ると、手に触れた感覚がします。
「触れる」という感覚は、身体のどの位置が触れたかの情報で表現できます。
位置情報は身体上の位置情報で表現できます。
触れるは、触れたか、触れてないかの2値(ON/OFF)で表現できます。
AIロボットの表面に多数の接触センサを設置し、そのセンサのON/OFFを仮想世界の自分の身体にマッピングすれば、触覚を表現できるのです。
AIロボットの指先にテーブルが触れれば、仮想世界のAIロボットの指先の触覚がONとなり、AIロボットの意識は、指先に何かが触れたと感じるのです。
これが触覚のクオリアです。
次は「痛み」です。
痛みのセンサーは痛覚です。
手の甲をつねると痛みを感じます。
強くつねると強く痛みます。
痛みは、2値でなく大きさをもちます。
痛みが大きくなれば、意識は大きな苦痛を感じます。
色や位置と違って、「苦痛」は物理的なデータではないので測定できるものではありません。
ですが、意識が感じるものとして定義することはできます。
意識が感じるものとして「快」「不快」を定義します。
意識は、「快」を求めて「不快」を避けます。
「痛覚」センサーからのデータが大きくなると、意識は「不快」の度合いが大きくなるように構成されています。
手の甲を強くつねられて「痛覚」センサーから大きなデータが送られてくると、意識は強い「苦痛」を感じます。
「痛覚」センサーから送られてくるデータが「痛み」のクオリアです。
意識は、「痛み」のクオリアを受け取ることができるように構成されているわけです。
「痛み」のクオリアは、物理的なデータではありませんが、意識が感じることができるように定義されているものです。
「苦痛」とは肉体的な「不快」で、意識は「苦痛」を感じると「苦痛」を取り除く行動を取ります。
AIロボットの身体の表面に多数の痛覚センサーを設置します。
AIロボットの手の甲を、田中さんがつねったとします。
すると、AIロボットの意識は、仮想世界の自分の手の甲の位置に痛みを感じます。
これが「痛み」のクオリアです。
つねられたAIロボットは、「イテテテテ」と言って、苦痛から逃れるために仮想世界の手を引っ込めます。
仮想世界の身体と現実世界の身体とは連動していて、意識が仮想世界の身体の手を引っ込めると、現実世界のAIロボットの手も引っ込められます。
田中さんに手をつねられたAIロボットは、「イテテテテ」といって手を引っ込めるわけです。
これを、AIの疑似的な意識っぽいものということは簡単です。
でも、僕が田中さんに手をつねられると、僕も「イテテテテ」と言って手を引っ込めます。
それでは、僕は本物の意識を持っていて、AIロボットは疑似的な意識をもっていると、どうやったら判断できるのでしょう。
本物の意識と疑似的な意識の違いとは何でしょう?
それを明確に指摘できないのであれば、これを意識と呼んで何が問題なのでしょうか?
参考:「クオリア体験と僕が幽体離脱した話2」
AIに「痛み」があるかを疑い、人間と違うと指摘するならば、
人間に「痛み」があるかを疑って見てはどうですか。
人間は「何か(おそらくは身体にとって不都合な影響が生じている状態)」を身体内部の神経(センサ)から感じ取り、その感覚(データ)を「痛み」と言う言語で定義します。
「データA」=「痛み」だと。このように考えれば認識は正確には「痛み」ではありませんし、毎度同じ程度のものでもありません。
クオリアの定義は知りませんが、その定義が不確かなことをいいことに他者にケチをつけるならば、まず自分の考える定義を定めるか定める努力をするべきです。というより他の人の定義にケチをつけるなら根拠が「わからないこと」である、というのは建設性がなく、哲学者としてはあまり好ましくないであろう「絶対的懐疑主義」の立場に当たります。
人間にしても、一体なんという表現をしたら良いかわからずカテゴリエラーのような状況に陥ることはあります。高音のものに触れた時に「痛い」のか「熱い」のかわからないように。
あるいは「too Hot」なのか「熱い」なのか。
クオリアは認識と言語の合成物なのでしょうか? 私は詳しくないのでわかりかねますが、そうではないと思いたいです。
であれば、厳密には人間も「痛み」を認識しているとは言えないのではないですか。私たちは「痛み」を認識しているのではなく、おそらくは一般的に「痛み」にカテゴリされるであろう「感覚」を受け取っているに過ぎないのではないでしょうか。
もし、クオリアが言語に先立つ感覚(データ)なら、機械は人間の赤子同様、他の人間がどういう場合に「痛い」と言い、どういう場合に「熱」と言うのかを学べば、人間のように主観的にそのカテゴリを行えると思います。
中畑様
コメントありがとうございます。
「ケチをつける」が、どの部分を指して言っているのかがちょっとわからないです。
僕は、ケチをつけた気はないのですが、どこかの文章が、中畑さんにとって「ケチをつけてる」と感じたみたいですね。
いずれにせよ、今回の中畑さんのコメントは、質問してるわけでもなく、僕が、何か回答すべき内容でもなさそうですね。
ただ、思ったことを言いたいだけのようですので、言いたいことが言えて気が済んでくれればいいと思います。
これは、すみません。
どうやらサイトの形式を誤解しているようで、他の方のコメントに対しての意見のつもりでした。
その方のコメントの下に「返信」があったので、その方のそのコメントへの返信として、処理されると思ったのですが、どうやら全て田方さんへのコメントとして処理されるようですね。
御察しの通り、田方さんへのコメントではありませんので、お気になさらないでください。
「感覚(データ)」でもなく、それに経験的に対応させる「言語」でもない、その中間のような、あるいはその両方のような「クオリア」というものをどう考えるべきかについて悩みながら書きました。
中畑様
すみません、こちらが勘違いしていましたようです。
確かに、中畑さんのコメントは、田中太郎さんへの返信となっていました。
全てのコメントは、管理者である僕のところにメールが来るので、つい、自分への返信だと思ってしまいました。
私が読んだ以下の二冊の書籍(読んでいたらすみません)
意識の正体についての説明が書いてあるので引用します。
ロボマインド・プロジェクトでお役に立てれば幸いです。
松尾豊『人工知能は人間を超えるか』 (角川EPUB選書)
>私の考えでは、特徴量を生成していく段階で思考する必要があり、その中で自分自身の状態を再帰的に認識すること、つまり自分が考えているということを自分でわかっているという「入れ子構造」が無限に続くこと、その際、それを「意識」と呼んでもいいような状態が出現するのではないかと思う。
甘利俊一『脳・心・人工知能』 (ブルーバックス)
>意識とは、自分がいま何をしようとしているかを自分で知っていることである。こう考えれば、コンピュータに意識を植え付けることは容易であろう。
コンピュータのプログラムが走っているときに、これは何を計算しているか、その計算はどのような意義を持ち、どの程度重要なのか、いまどこまで計算が進み、次はどこへ行くのか、などを理解し監視するプログラムを付加しておけばよい。これは後付けの機能のように見える。
このプログラムが問題ありと判定すれば、元のプログラムに介入し、その決定を変えることができる。
あと、余談ですが気になることを質問です。
このサイトの「採用情報」のページにある
PCの前に座る田方さんの画像がありますけど
なぜモニターが3台もあるのでしょうか(^^;)?
3台ともWindows 10のデスクトップだし。
マイクもありますけど、何に使っているのでしょうか?
机の上の分厚い紙も気になります
すみません。問題なければ教えて下さい。
よろしくお願いします。
Karat様
コメントありがとうございます。
松尾先生のこの本は、僕も読みましたよ。
ディープラーニングについて、一番わかりやすく説明していて、かなり参考になりました。
松尾先生といえばディープラーニングですが、意識とか汎用人工知能とか、その先の話になると、ちょっと物足りないですねぇ。
「入れ子構造」が無限に続くと意識になるって、ちょっとイメージできないですし。
甘利先生の本は、この本ではないですが、昔、読んだ記憶があります。
意識が、「監視するプログラム」というのは、すごくよくわかります。
僕の場合、これはシミュレーションすることで実現するようにしています。
モニターが3台あるのは、開発するときは、いろんなウインドウを開くので、モニターは多いほうがいいもので。
マイクは、リモートで働く社員とスカイプで連絡するときに使ってます。
田方 篤志様
ロボットと心ですか、興味深く読ませていただきました。サイト作成に感謝します。
さて、ロボットつまりコンピューターにできることはインプット・処理・アウトプット
だけだと思います。その行えることは全て、ハード・プロブレムで言われているところ
の機能・反応に該当すると思うのです。
ハード・プロブレムとは、その機能・反応の中にどうすればクオリアを実現できるのだ
ろうかという問題提起であります。
コンピュータのインプット・処理・アウトプットにいくら手を加えてたとしても、その
実現できることは全て機能・反応だと思います。
であるならば、いかにコンピューターをいじった(機能・反応に手を加えた)としても
クオリアを発生させたと証明できたことにはならないと思いますが、いかがでしょうか?
Sakura様
質問、ありがとうございます。
ハードプロブレムへの質問、個人的に一番嬉しいです。
まさに、この部分が僕のアイデアの肝となるところです。
僕のアイデアとは、意識の仮想世界仮説のことです。
意識の仮想世界仮説とは、コンピュータの中に、外の現実世界そのものを仮想世界として構築して、意識は、その仮想世界を認識するというアイデアです。
つまり、世界は二重になっていて、意識は、内側の世界にしかアクセスできず、外の現実世界を直接認識できないというモデルです。
そして、意識が直接認識する内側の世界の部品がクオリアとなります。
それは、色であったり、形であったりするわけです。
内側の世界も意識も、コンピュータ自身が作っているので、意識が「リンゴ」を見て「赤い」と「感じる」経験すべてはコンピュータで作り出してるわけです。
「リンゴ」を見て「丸い」と「赤い」と「意識」が感じるとすれば、「丸い」と「赤い」は、「意識」が感じる世界の部品です。
「意識」が感じれる部品で、内側の世界は構築されるわけです。
この部品がクオリアで、内側の世界はクオリアで構築されるわけです。
世界そのものを自分で作り出して、それを感じて生きているわけです。
だから、同じ世界を生きていても、皆、同じように感じるとは限りません。
同じリンゴを見ても、リンゴを好きな人にとっては食べたいと感じますし、リンゴを嫌いな人にとっては食べたいとは感じません。
同じ「赤」を見ても、あなたにとっての「赤」と僕にとっての「赤」は異なるわけです。
これがクオリアです。
コンピュータが行うインプット・処理・アウトプットとは、たとえば、センサーで光の波長を検出し、「赤」と答えるようなシステムです。
この場合、外の世界を直接認識して、反応しているだけです。
たしかに、これだとクオリアを発生させたといえないですよね。
意識の仮想世界仮説とインプット・処理・アウトプットの違いが理解できたでしょうか。
>外部の世界と同じ世界を内部に再構築し、それを観察する意識。
このような心のプログラムを作れば、意識を発生させることができるのです。
オープンワールドのゲーム内のキャラクターに
このシステムを持たせれば可能なのでは?
早速、作ってみてはいかがでしょうか!
この現実世界ではなくて、あくまでもゲーム内の仮想世界になりますけど
コンピュータ内でシミュレートするのは、現実にロボット作るよりも敷居は低いですし。
クオリアで思うこと。
いくら、雨をリアルにシミュレートしても
実際に、雨に濡れるわけではない。
雨に濡れる体験が、クオリアそのものでは?と思います。
いかがでしょうか?
すみません。つい思いついたもので。
あと、提案なのですが
クラウドファンディングを利用して
ロボマインドプロジェクトの開発をするというのはいかがでしょうか?
いきなり、完成形を目指すのは無理でしょうから
段階的に目標を決めて、集まった資金で何かを実現させるだとか。
出資額によるリターンは何にするだとか。
よろしくお願いします。
karat様
コメント、ありがとうございます。
はい、これは、ぜひ、やってみたいことの一つです^^
そうなんです。
「身体」というのは、絶対に必要なんです。
同じ体、感覚器を持ってるから、人間はお互いに理解し合えるので、人間と同じ身体を持ったロボットを作らないと、本当のクオリアは再現されないと思います。
どこまでロボマインド・プロジェクトでやるかって話でして。
これも検討したことはありますが、今、一番必要なのは、お金より人材でして。
ロボマインドは、意外と小銭はあったりします^^;
コメント欄での議論は、クオリアを客観的に観察することを求めてるのに対して、そんなことに興味のない田方さんは、主観を振りかざしてクオリアを説明しようとして噛み合わない議論になってしまってるという構図ですね。”~を信じる”なんてのは到底科学とは言えずもはや宗教です。
山田太郎様
コメントありがとうございます。
20世紀までの科学は、客観性が重要でした。
電磁波とか音波とか、客観的に測定できるもの。
人間が介在しなくとも、客観的に観察できるものを扱うのが、20世紀までの科学でした。
でも、クオリアというものは、客観的に観察可能な音や色を扱うのでなく、主観的に感じているものを扱うものです。
つまり、客観的に観察できれば、それは、そもそもクオリアではありません。
どうやら山田さんは、クオリアの定義をわかっていないようですね。
客観性を振りかざして、客観的でないから宗教だと叫ぶまえに、
クオリアについて、もう少し勉強されてはいかがでしょう^^
クオリアを主観以外では捉えられないと言うのは現時点での話です。大昔、人類が意思疎通の手段として言語を獲得したように、将来人類がどのような進化をするかは誰にも分かりません。
現時点で主観でしか扱えないからと言って、反証可能性を無視して科学にすることは土台無理な話です。要は、主観を縦に何でもありのオカルトの話と同じということです。
山田太郎様
回答、ありがとうございます。
将来どうなるかわからず、反証可能性を考慮して、あらゆることを想定することと、主観を排除することは矛盾しないですか?
何の矛盾でしょうか?
現時点で主観でしか扱えないということは、反証可能性を担保できないので科学にはなりえないという単純なお話です。まさかとは思いますが、主観を前提にしている貴殿の仮説が科学になるとでもおっしゃりたいのでしょうか?
山田太郎様
コメント、ありがとうございます。
どうも、話がおかしな方向に進んでいるようなので、話を整理しましょう。
クオリアとは、Wikipediaによると「簡単に言えば、クオリアとは『感じ』のことである。『イチゴのあの赤い感じ』、『空のあの青々とした感じ』、『二日酔いで頭がズキズキ痛むあの感じ』、『面白い映画を見ている時のワクワクするあの感じ』といった、主観的に体験される様々な質のことである。」とあります。
つまり、現在の科学では、クオリアとは、主観で体験されるものと定義されています。
この点に関して、山田さんの意見では、「クオリア」は、反証可能性を担保できない主観で定義されるので科学で扱えないとの考えでしょうか?
それとも、クオリアは科学で扱えるけれど、僕の提唱する「意識の仮想世界仮説」は、科学でなく、宗教やオカルトであると糾弾したいのでしょうか?
まずは、この点から整理したいと思いますが、いかがでしょう?
クオリア問題は現在の科学では解決できてません。ゆえにチャーマーズのハードプロブレムが難しいとされているのです。
哲学的ゾンビという言葉をご存知でしょうか?
「物理的化学的電気的反応としては、普通の人間と全く同じであるが、意識(クオリア)を全く持っていない人間」(ウィキペディア引用)のことを哲学的ゾンビと定義しています。
ところで、この哲学的ゾンビ、自分以外の人間が、ゾンビであるあるいはそうでない、どちらでもかまわないのですが、科学的に証明する手段があるとお考えでしょうか?
これを証明できないのであれば、クオリアは科学的に扱えないことの証左です。当然、クオリアを前提にしている意識の仮想世界仮説も科学にはなりえないということです。
山田さん、回答、ありがとうございます。
山田さんの目的は、クオリアや意識を科学的に証明することのようですね。
僕は、そんなことには、全く興味がなくて、僕の目的は、人と普通に会話できるシステムを作ることです。
そのために、意識やクオリア、主観といったことをプログラムで実装可能に具体的な理論に落とし込んでいるわけです。
決して、物理的化学反応で検証可能なクオリアを探そうとか、証明しようとか思ってはいません。
ただ、クオリアが、物理的化学反応で検証可能とは、思っていませんが。
僕の作ろうと思っている意識の定義は、「チューリング・テストと心の仕組み(心のエコシステム)」に書いてあるとおりです。
ところで、山田さんは、クオリアは現在の科学で解決していないとの意見ですが、それでは、どうなれば、クオリアを科学で解決したと言えるのでしょう?
たとえば、ある特定の脳細胞を殺して、その人の見る世界から「赤」が消えて、その脳細胞を生き返らせれば、その人の見る世界から「赤」が復活できたとすれば、その脳細胞が「赤」のクオリアということになるのでしょうか?
そういう脳細胞を探せという意見でしょうか?
山田さんは、あれもダメ、これもダメというだけで、具体的にどうなればクオリアを証明できるのかを全く示していないので、もし、そのようなものがあれば教えてください。
もし、そのようなものがなければ、それでもかまわないですよ。
そんなことで、僕は、怒ったりしませんので^^
クオリアは科学でないと言っている私に、科学的な証明の仕方を尋ねてるのでしょうか?
控えめに言って、頭大丈夫ですか(^^;
何度も言いますが、現在の科学ではクオリアの解決はできません。。。が・・・まあ、貴殿がそこまで仰るなら、無理にでも解決の糸口をさがしてみましょう。そうですね~例えば、シックスセンスの持ち主で人の心を自在に読むことのできる超能力者を、世界中から見つけ出すことから、まずは始めてみてはいかがでしょうか?ほら、たまに超能力者がいるとかいないとかって話ききますよね。
冗談はさておき、お気づきでしょうか?クオリアを無理に解決しようとすると、このように必然的に「オカルト」に足を突っ込むことになるんです。現代科学では解決不可能だからです。
貴殿にクオリアの興味がなくとも、この事実は変わりませんし、クオリアを前提にした「意識の仮想世界仮説」なる貴殿の仮説もまたオカルトということになるわけです。
山田太郎様
回答、ありがとうございます。
最初に、山田さんにお願いがあります。
このコメント欄は、建設的な議論をする場として用意しておりますので、「控えめに言って、頭大丈夫ですか(^^;」といった誹謗中傷は、お控えください。
今後、そのような発言があった場合は、適宜編集させていただきますので、ご了承願います。
それでは、建設的な議論を始めたいと思います。
山田さんは、なにかというと、オカルトと批判しますが、その意図が、よくわかりません。
僕の仮説を貶めたいという気持ちは分かるのですが、何が言いたいのか、もう少し論理的に説明していただけないでしょうか?
僕の説が、科学で証明できないから無意味だといいたいのでしょうか?
その点に関しては、何度も言ってる通り、ロボマインド・プロジェクトは、科学的な証明をしようとしているのではなく、人と会話するシステムを作ろうとしております。
科学的な証明を目的ともしておらず、そのように主張もしていないのに、科学的でないと批判しても無意味です。
こちらとしては、「はぁ、そうですか」としか答えようがなく、議論にすらなりませんので。
「意識の仮想世界仮説」の何を批判したいのか、論理的に説明してください。
「オカルト」といった曖昧な表現や、回りくどい説明でなく、誰が読んでも明確にわかるように、「意識の仮想世界仮説」のどの部分が、どう問題だと具体的に説明してください。
何度も言いますが、「意識の仮想世界仮説」は、科学的にクオリアを証明するための仮説ではなく、言葉を話すシステムのための仮説ですので、その内容に沿った議論をお願いします。
そんな難しいことは考えていない、ただ、田方がムカつくから文句を言っているだけなら、そのように回答してください。
追記
「どうなれば、クオリアを科学で解決したと言えるのでしょう?」の問いにお答えしておきます。
人類がこれまでの進化の過程で言語を獲得できたように、遠い遠い将来、クオリアの共有という進化を果たす日がくるかもしれません。クオリアを科学的に解決したと言えるのはこの時だけです。
キーワードは「共有」です。主観ではだめなのです。客観以外は科学になりえない。単純な話です。
山田太郎様
追加の回答、ありがとうございます。
この文章も、また、よく意味がわかりません。
クオリアの共有という進化をしていない現在の人類にとって、クオリアは科学的に解決していないという意味までは理解できます。
分かりにくいのは、クオリアの科学的な証明と、クオリアの存在の区別が明確にされていないことです。
現在、クオリアは科学で解決していないといいたいのはわかるのですが、山田さんは、現在は、クオリアが存在していないとの考えなのでしょうか?
つまり、遠い将来、クオリアを共有する進化を遂げたとき、科学的に解決するとのことですが、科学的に解決しない限り、クオリアは存在しないと考えているのでしょうか?
もしそうなら、wikipediaで説明されている「赤のクオリア」といったものは、山田さんは、どうお考えなのでしょうか?
科学的に証明されてないものは、存在しないという考えなのでしょうか?
それとも、現在でも、クオリアは存在するが、それを、科学的に解決できてないだけとの考えでしょうか?
もしそうなら、クオリアの共有まで進化した人類の持つクオリアと、現在の人類の持つクオリアとが同じものとは断定できませんので、その進化をもって、現在の人類が持つクオリアを科学的に証明したと言えないのではないでしょうか?
または、そんなことまで考えずに、思いつきで書いただけの文章ということなら、そう言っていただければ、これ以上、議論しませんので、そう言っていただければと思います。
それから、一番意味不明なのは「クオリアの共有」です。
「クオリアの共有」とは、どういった現象のことを指すのでしょう?
そのまま解釈すると、ある人が「赤のクオリア」を感じると、他の人も、同じクオリア感じるといった、超能力をを想像してしまいます。
そんな超能力を人類が獲得したとき、クオリアを科学的に証明できるといいたいのでしょうか?
それこそ、山田さんの好きなオカルトの話のように聞こえますが、この解釈で間違いないでしょうか?
追記2
「チューリング・テストと心の仕組み(心のエコシステム)」をざっと拝読しました。
自然な会話ができるAIをつくることができれば、必然的に人の心が宿ると仰りたいのでしょうか?
心とはクオリアそのものです。現在の科学ではクオリア(心)の存在証明が不可能な状況において,如何にして第三者に心の宿ったAIであることを科学的に証明するおつもりなのでしょうか?その点に関しては貴殿に興味が無いご様子なので、ご自身でもオカルトと割り切っておられるのでしょうか?
山田太郎様
回答、ありがとうございます。
何度言っても、山田さんは理解されないようですので、もう一度だけ、説明しておきます。
ロボマインド・プロジェクトは、第三者に心の宿ったAIであることを科学的に証明するためのプロジェクトでもなく、そのようなことを目的にしているともどこにでも書いていません。
批判する前に、文書をちゃんと読んで理解してください。
山田さんは、いつも、オカルトといって批判しますが、何を批判したいのかがわかりません。
僕の提案する手法だと、会話できるAIが実現できないと批判したいのでしょうか?
それなら、その理由を書いてください。
それとも、会話できるAIができても、心があると科学的に証明できないから意味がないといいたいのでしょうか?
その批判に対しては、科学的に証明されようが、されまいが、そんなことはどうでもいいことです。
僕は、会社の経営者なので、会話ができるAIが完成すれば、それだけで、世の中に大きなインパクトを与える価値のある商品となりますので、科学的な証明など、どうでもいいわけです。
だから、なぜ、山田さんが科学的な証明にこだわるのか、さっぱり理解できません。
おそらく、感情的になりやすいタイプで、つい、ムキになって、何でもかんでも批判してやろうと書いてるだけとは思いますが。
もし、そうでないなら、論理的な説明をお願いします。
「意識のハードプロブレムが解決しました」というこのブログのタイトルからして、貴殿の珍説が、単純なAIの会話にとどまってないのは明白です。
例えば、心のメカニズムを解明し、そのメカニズムを応用してプログラムに落とし込みましたって説があるとしましょう。この説は「心のメカニズムの解明」って時点でもはやオカルトです。心(クオリア)が科学で説明できないからです。
ここまでは、同意いただけますでしょうか?
その後、プログラムが奇跡的に会話ぽいことをし出した場合の議論は、後回しにします。
私より貴殿の方が感情的になられてるように感じます。あまりムキにならないでくださいね。
これからは丁寧に一歩ずつ同意できる点を探って導いていくことにします。
山田太郎様
回答、ありがとうございます。
前回もお願いしましたが、「オカルト」という表現は、意味が曖昧ですので使わないでください。
意味をくみ取って「科学的でない」と解釈します。
また、「珍説」といった揶揄した表現もお控えください。
今後は、こちらで訂正させていただきますので、ご了承ください。
タイトルに関しては、科学論文でなく、ブログタイトルという文脈で読み取ってください。
つまり、あくまでも読者を引き付けるための、いわゆる「釣りタイトル」というわけです。
「解決した」との表現から「科学的に解明された」と勘違いするかもしれませんが、どこにも、科学的に解明したとは書いていません。
これも、解明とは書いていますが、科学的に解明したとは書いていません。
また、「解明」の言葉の意味は、「科学的」のみに限定されるものではありません。
本人が、科学的に解明したわけではないと言っているのに、科学的でないと批判するのはおかしいでしょ。
「うどんを作りました」といっているのに、「これはハンバーグでない」と批判しているようなものです。
「科学的でない」と批判したいのであれば、「科学的である」と主張しているブログがあって、山田さんが「科学的でない」と判断したのなら、その人のブログにそう書きこんでください。
少なくとも、当ブログに書きこんでも意味のないことですので。
貴殿はブログ記事にて「意識のハードプロブレムが解決したといってもいいですよね。」と他者にむけて同意を求めてます。解決したとする解説も長々とされてますね。
他者に自説を述べる際の手法としては、宗教的手法(とにかく信じなさい)か科学的手法以外にありません。そして貴殿は科学的手法を放棄している以上、宗教的手法つまりは「オカルト」ということになるわけです。
これでご理解いただけましたでしょうか?
山田太郎様
回答、ありがとうございます。
こんな話は聞いたことがありませんので、根拠を教えてください。
では、くどいようですが、もっと噛み砕いてご説明いたしましょう。
自説を述べるとき、世の中には、科学的手法かそうでないかの2種類しかありません。
科学とは反証可能性が担保されていることを指します。反論が可能であれば、どんな奇説であってもすべて科学ということになります。説が正しいか間違っているかは関係ありません。
反論が可能であればすべて科学です。
一方で、例えば「神様のお告げ」的な説は、そのお告げを聞けない人々(客観性がないもの)には、反論出来ないわけです。よって、反証可能性を担保できないので非科学的ということになります。これを宗教的手法(非科学的手法)と呼びます。
同様に「心のメカニズム」にも同じことが言えます。心(クオリア)には客観性がないので、やはり、反論出来ません。よって宗教的手法(非科学的手法)ということになります。
これでおわかり頂けましたでしょうか?
山田太郎様
回答、ありがとうございます。
ただ、まだ納得できませんので、ディープラーニングを例に、具体的に説明してください。
ディープラーニングは反証可能性があるといえるのでしょうか?
あるとなれば、どのような検証で、結果がどうなれば、科学といえるのでしょうか?
お答えください。
横からすみません。
こういった話に昔から少しだけ興味があったもので、少し発言させてください。
(高校生の頃、「意識する脳」って本と、「最新脳科学:心と意識のハード・プロブレム 」っていう学研のムックを読んだことがある、という程度です)
私の記憶では、「ハードプロブレム」という問題は、
『自分はゾンビではない!』と考える人たちが、
1.『痛み』という知覚を『嫌だ』と感じる気持ち(=主体的意識)の発生原理
2.意識の座がどこにあるか
について、全然解明されていないよね、って問題提起だったように思います。
なので、「そもそも有機生命体に『痛み』なんてオカルトめいたクオリアは存在しない」って主張するゾンビたちにとっては非科学的な話になるはずで、彼らゾンビにとっては『ハードプロブレムなんて存在しない』としか言いようがなく、そもそもゾンビには『ハードプログラム』の問題意識を理解することが出来ません。
ゾンビも、叩かれたら『痛い!』とか『嫌だ!』と叫びますが、それは神経やらが勝手に反応しているだけで、『イヤダ!』と発音することとまでが反応の一部であって、『べつに意識などというオカルト的なものが嫌悪しているわけではない』という解釈です。
ブログ記事を拝見しましたところ、こちらに言及されている問題はすべて『イージープログラム』に類するものであるように感じました。
「ハードプロブレム」は、外界から得た情報を判断して行動するプロセスを扱うというような表面的なものではなく、
『知覚』という現象の(物理的でない)主観的な側面の発生原理や、クオリアが報告可能な状態になるための物理プロセスなどが解明されていないということを問題視したものかと思います。
たとえば、コンピュータで例えるなら、(コンピュータにおける意識の座が、メモリ内における電位変換の瞬間に生じるキラメキというか原始的な知覚みたいなものの連続だったと仮定して)、人間がプログラミングしたとおりに動いたにすぎないのに、コンピュータが『俺は自分で思い立って、自発的に情報を処理してやったぜ』と思い込むのは何故か。その原理を突き止めたい、というようなことになるかと思います。
コンピュータが先天的に工場で設計され、後天的にはソフトウェアがインストールされ、人間のインプットに応じて動くだけの装置だというのであれば、人間も、先天的に遺伝子などで設計され、後天的には社会や環境によって各種情報や処理がインストールされた、目鼻耳などのセンサーデバイスにて収集したデータを脳が処理して反応するだけの装置に(表面的には)すぎません。
しかし、我らゾンビでない人間は、コンピュータに意識があるかどうかは確かめようがありませんが、自分自身の知覚の存在だけは確認できています。
なので、『証明済みの、このオレの知覚や意識は、どうして生まれているのか』という命題になるのだと思います。
その前提条件である、『人間に主体的な意識など存在するだろうか?』ということに疑問がある場合、『ハードプロブレム』は、問題点を理解できないはずですので、反論すらできないのではないかと思います。
沼針様
丁寧なコメント、ありがとうございます。
何度も読ませていただいたのですが、沼針さんの言いたいことが、まだ、明確にわかりかねます。
ここで言いたいのは、「意識が、どうやって生まれるのか」と、自分で、考えるようになれば、意識が発生したといえるということでしょうか?
もし、そうなら、そういう風に考えるようにプログラムすればいいと思うのですが、おそらく、それじゃ、意識ではないと反論されると思います。
では、人間が、そういう風に考えるように教えられて、考えるのとどう違うのかと思います。
そういうことを言いたいのではないのでしょうか?
具体的に、こういったことができれば意識があるといった形で提示していただければ、議論ができると思います。
今回のコメントでは、そういったことが明確になってないので、何とも答えようがないというのが正直な感想です。
このブログだけでなく、「主観と客観」や「意識の仮想世界仮説」なども併せて読んでいただければ、僕の主張が伝わると思います。
できれば、そちらも参考になさって、僕の提唱する「意識の仮想世界仮説」では、こういったことができないから、意識とは言えない、または、ハードプロブレムが解決されてないという形で説明していただければと思います。
どうぞよろしくお願いいたします。
ご返信ありがとうございます。
>こういったことができれば意識があるといった形で提示していただければ
『こういったことができれば意識があるといった形で提示することが難しい』という問題提起が『ハードプロブレム』だと認識していますが、異なる見解をお持ちでしょうか?
ちなみに、私が『意識のハードプロブレムが解決しましたが、何か?』というタイトルを読んで思ったのは、『いつのまにか意識があることを客観的に証明する方法が見つかっていたのか?』です。
・チューリング・テストと心の仕組み(心のエコシステム)
・主観と客観
・意識の仮想世界仮説
・意識を定義して、どんなものに意識があるか判定すると意外な結果が
・そもそも意識って何?人工知能で人工意識は作れるの?
を拝見させていただきましたが、ここで言及されているのは(「意識する心」という本で書かれていたように記憶するのですが)『反応』と『機能』という表層的なイージープロブレムについての事であって、『好き/嫌い』というような内面的な現象に言及されていないよう、お見受けしました。
ハードプロブレムの難しさは、田方さまが繰り返し
>そのシステムに主観的な意識があることを客観的にどう確かめるんでしょうか。
と投げかけていらっしゃるくらいですから、ご理解いただいていると思いますが、
・主観と客観
で言及されている、ライントレーサーで言うのであれば、
「『ズレている』ことにこのうえない快感を覚え、『ピッタリ』に不快感を覚える「ライントレーサー」の好みを、人間がどのように観測・検証できるのか。という疑問は、じつにハードプロブレムだ」
といえばしっくりくるのではないでしょうか。
コンピュータが「1+1」の演算処理に『甘さ』を感じるとします。「1+2」の処理には『苦さ』を感じるとします。
人間が命令すれば「1+1」の演算処理も「1+2」の演算処理も何も問題なく行われるので、何の違いもわかりません。
コンピュータの内面では「1+1」を喜んだり、「1+2」を苦しんだりしているのではないか。
ところが、現在、これを調べることが出来ないということが『ハードプロブレム』の入り口という認識です。
ここで言う「甘い」や「苦い」は表層まで現れませんので、ハードプロブレム未解決の人間には認識できませんが、もし、コンピュータが「アマイ」とか「ニガイ」とか、ご丁寧に反応してくれるのであれば、「どうやら、コンピュータにとって1+1という計算は甘く、1+2というのは苦く感じるのだな」と科学的に解釈できる、イージープロブレムになります。
コンピュータの意識の存在をどうやって確認するか、そして(ハードプロブレムと言った時はこっちがメインに感じますが)「1+1はコンピュータにとって、なぜ苦くなく、甘いのか」、「そもそもコンピュータにとって『1+1が甘い』、とはどういうことなのか」、「そう感じる物理的な位置はどこにあたるのか」というような疑問が、ハードプロブレムの領域だと思っています。
いろいろな記事を読ませていただいて感じることがありましたので、少し失礼いたします。
全般的なお話しですが、そもそも科学的なアプローチでハードプロブレムを論じているような気がします。
ちなみに、デヴィッド・チャルマーズという人の『意識する心』という本が、ハードプロブレムを世界一わかりやすく示している本だと思います。(ハードプロブレムそのものを提起した書籍でもあるので、ある意味ハードプロブレムの定義が書かれている原本とも言えます)
逆に、サイトなどで語られているハードプロブレムは、無理に科学的アプローチで説明しようとするあまり、『それはイージープロプレムに類するものでは?』というようなものを多く含んでいたりすることがあり、正しくハードプロブレムを理解できないかもしれません。
ハードプロブレムは、科学者であり哲学的でもある人たちが、双方のアプローチで意識を考察していった結果、哲学的に証明できる範疇でも科学的に証明できる範疇でもない、『ここの部分がすっぽり抜けてるね』という部分があることに気づき、指摘したもの、と理解しています。スタートは哲学的アプローチですので、哲学的アプローチでモノを考えはじめないとハードプロブレムは理解しがたいはずだと感じています。
順を追ってお話しします。
①
むかし、科学的なアプローチのみで『心』を証明しようとする唯物論というものがありました。
科学が急速に発展した時代、科学の万能性を目の当たりにした人類は科学を妄信するようになって、唯物論がとても支持されました。この唯物論は『心や意識などオカルトであり、存在しない』、『物理的な状態変化がすべて記述されるのであれば、それが心というものだ』という主張に変化しました。(古典的な一元論と言われるものでしょうか?間違っていたらごめんなさい)
②
デカルトという前時代人が、上の主張に対し、『そうは言ってもよ、全人類がゾンビならば、なぜ人間の言語に「意識」や「心」なんて言葉があるんだ』と考えました。そして、(物理的な存在である)身体に起こった物理的現象から客観的に観測できない「心」や「意識」について、自らペンで紙に書いたり、コンピュータにタイピングできたり物理的な動作に影響しているわけだから、少なくとも物理的に説明できない『何か』あるはずだ、と考えました。(これは、のちにチャーマーズが『現象報告のパラドックス』と命名するものと類似します)
③
さらに、デカルトは、『どれだけ意識の存在を疑ったところで、疑っている自分の意識までは否定できない、すなわち自分の意識はあるということだ』と主観的に証明しました。
『我思う、ゆえに我あり』というやつです。
この『我思う、ゆえに我あり』は、科学的アプローチで考えると非科学的であり、何も証明できていることにはなりませんが、ゾンビでない人は全員主観的に理解しますので、科学的アプローチで証明できないものを、哲学的アプローチで証明した、という評価になります。(私が思うに、『我思う、ゆえに我あり』が『何も証明できていない』と感じるのであれば、ハードプロブレムが何を問題視しているかを理解できないと思います。ハードプロブレムは、これらを理解する「哲学者」たちによって語られるものです)
④
脳や神経の科学が進むにつれて、心理的な作用の原因が物理的に解明されてゆき、科学的なアプローチから「入力される刺激と出力される反応(=行動)の相互関係を示す法則」を発見しさえすれば、「心や意識は解明できた」ことになると考えられました。(イージープロプレム)
また、デネットの実験(やろう!と意思決定する前に身体はやることを決定している。意思は後付けという証明)などから、『人間に自由意志など存在しない』、『人間の心は身体を動かすこと(念力)などできない』、『意識は、身体の物理的な反応に追従するだけのゴミだ』と、意識が人間の行動の原因ではなく、結果に過ぎないと分かってくると、いよいよ『心は説明され尽くした』と考えられるようになりました。
⑤
いや、ちょっと待てよ、と。物理的な記述のみで、意識の感じる『痛み』とかを本質的に表現しきれるというのか?そもそも『痛み』とは何なのか。
とりあえず『痛み』の存在は、(我思う、ゆえに我あり式に)主観的に証明できる。つまり、まだ記述できてないものがある。この、『痛みという感覚そのもの』をどう扱うのか(=ハードプロブレム)について何も解決していないじゃないか。解決したと言ってるのは、「ニューロンの発火で意思が生まれるように見える」とか、「ある神経を刺激すると痛がるようだ」とか、「言語を理解するとき脳のこの部分が化学的伝達物質を受容するらしい」とか、人間を装着としてみたときに、何を与えたらどう振る舞うかという、反応と機能(イージープロプレム)についてばっかりで、装置の内部における物理的な反応が、どのように意識という霊的なものを生むのか、物理と精神の二つの関係は相互なのか片務なのか無関係なのか。意識というオカルトめいたものがどう生まれ、どういう理屈でどういう感覚を主観に発生させているのか、装置における意識とはそもそも何なのか。というハードプロブレムには一切触れていないではないか。
という流れになります。
なにかのヒントになればと思います。
蛇足を書いて遅くなってしまいましたが、お尋ねの
>僕の提唱する「意識の仮想世界仮説」では、こういったことができないから、意識とは言えない、または、ハードプロブレムが解決されてないという形で説明していただければと思います。
に回答させていただきます。
なお、そもそも『こういったことができないから、意識とは言えない』は、ハードプロブレムが解決しないと言えないことですので、お答えできません。(意識の有無を客観的に確認する方法、同一意識モデル同士の比較方法について、何を証明したら解決と言えるかすら分からない、というのがハードプロブレムです)
さて、「意識の仮想世界仮説」に書かれていることは、どちらかというと決定論や心脳問題にフォーカスしたものであって、ハードプロブレムとはあまり関係のない議題に思えましたが、(かつて学研のムックで読んだ気がする)『シミュレーション仮説』とか『ビットの海』という思考実験が近いかと思いますので、それに沿って、『何が解決すればハードプロブレムが解決したと言えるのか』について、私の見解をご説明させていただきます。(『水槽の脳』という思考実験も近いところがあるかもしれませんが、『ビットの海』は、たしかマトリックスの元ネタだったような記憶がありますので、親和性が高いかと思いました)
『ビットの海』とは、
無限に用意されたビットの海に、物理法則のみを唯一のルールとして用意し、そこに膨大なエネルギーを投入します。すると、そのエネルギーは質量を生みつつ、投入点を中心としてビットの海に宇宙空間をフォーマット(ビッグバン)していき、以後、フォーマット済の領域を広げていきます。その宇宙に数々の銀河が生まれ、地球っぽいものが生まれ、そこのヒト型生命体が社会を構築し、ある個体はタンスの角に足の小指をぶつけて痛がっている、というような枠組みの思考実験だと思ってください。
この仮説で提唱者が言いたかったことは、主に『未来はあらかじめ決まっている』とか、『物理世界は因果的に閉じている』というような決定論的なことだったように記憶しています。
さて、この枠組みでハードプロブレムを言うのであれば、タンスの角に足の小指をぶつけて痛がっているヒト型生命体が、他の物質に意識があるかどうか(好き、嫌い、なんかムカつく、懐かしい、眩しい、というような知覚や意識を持っているかどうか)という命題に対して、
『こういう実験を行って、こういう結果が得られれば、意識があるって客観的に証明できたことになるのでは?』
という証明方法を見つければ、『ハードプロブレムは解決した』と言えると思います。なお、『意識があることを証明できない』こと自体もハードプロブレムとして扱われますが、本来的というか、狭義でのハードプロブレムには含まれないと思います。
あくまで、『いったい何をやったら証明出来たと言えるのか、その方向性すらわからない』という厳しすぎる状況を指してハード(難しい)プロブレムと呼んでいるのですが、このあたりは『意識する心』を読むと問題の構造がわかると思います。
軽くご説明いたしますと、
『AもBもCもDもEもわからない。そもそも、何をどう調べて、どういう結果を用意したらA〜Eの謎を解明したと言えるのかすらわからん』という構造で、この中でハードプロブレムと呼ばれているのは『どういう結果を用意したらA〜Eの謎を解明したと言えるのか』の部分です。ただし、A〜Eが解明したのなら、当然ハードプロブレムも部分的には解決しているはずなので、皆さんA〜Eのこともハードプロブレムと呼びます。(チャルマーズでさえも)
内訳は以下のような感じだと思います。
A
任意の物体に意識が宿っているか否かを客観的に(科学的に)検知する方法を確立する。
B
Aを踏まえ、意識の発生原理を突き止める。何を満たしたものに意識が宿り、意識あるものから何を除けば意識を失うかを突き止める。
C
Bを踏まえ、意識の単位をモデル化(宇宙の主体的意識、宇宙を構成する銀河の主体的意識、それらに被さる社会など共同体としての主体的意識、それを構成するヒトの主体的意識、ヒトを構成する臓器の主体的意識、臓器を構成する細胞の主体的意識、細胞と共存関係にある微生物の主体的意識、などなど)し、同一単位の意識やクオリア同士が等価である(クオリア逆転)か否かを比較判断する方法を確立する。(ここではじめて『意識』の基準が設置可能となるので、共有の概念として『意識』を科学で扱うことができるようになるという認識です)
D
センサーデバイスである目鼻耳口皮膚など外界からの刺激で生まれる電気的・科学的伝達物質が、どのようなプロセスで、なぜ伝達物質と対のクオリアにならなければならないのかを証明する。(この伝達物質がなぜ『眩しさ』でなく『恥ずかしさ』のクオリアを発生させなければならない必然性を持っているのかを検証し、因果関係を整理する)
D
意識とは何なのか、物理学ではどう記述すべきなのか、または、新たな法則を定めるべきなのかを見定める。
という感じです。
うまく説明できていないかもしれません。意味が取りづらいところがあれば、私の見解から、わかる範囲で補足いたしますので、お声ください。
沼針様
丁寧な回答、ありがとうございます。
沼針さんが、ハードプロブレムの何が分からず、悩んでいるか、これでよくわかりました。
そんな、沼針さんに、ぴったりの動画がありますので、それを紹介させていただきます。
こちらの動画です。
「物理学 vs 哲学 物理学で『意識』は解明できるのか」
これを見ていただければ、沼針さんの悩みが解消できると思います。
続き物の動画となっていますので、順番にみていただければと思います。
今後も、随時アップしていきますので、興味があれば、チャンネル登録していただければと思います。
新着動画を見逃したくないというのでしたら、メルマガ登録することもお勧めします。
動画を見て、分からないところなどありましたら、気軽に質問してくださいね。
田方さま
ご返信と興味深い動画のご紹介、ありがとうございます。
とりあえず、Vol.1を拝見させていただきました。
(続きも見せていただきます!)
動画の中で意味がつかめなかった箇所や、疑問点について、3点質問させてください。
■質問1
動画でのご発言に
「コインを取って喜んだり、キノコにぶつかって無敵になったり、これって僕たちの頭の中と同じ」とありますが、
これを証明できたということであれば、
①意識というものが存在することを証明し
②自分の意識を客観的に観測し
③コンピュータの感情や意識も客観的に観測し
④さらにその二つが等価であると判断できた
というように聞こえてしまいます。
もし、これが事実なのであれば、「ハードプロブレムは解決した!」
と言っても過言ではないと思いますが、
おそらくそういった意味ではないのではないか、と感じています。
どのような意味なのでしょうか?
■質問2
「脳を原子・電子レベルまで解明して、脳と全く同じものを作っても意識が生まれるわけではない」
というご発言も、意識というものの存在を証明できているかどうかはさておき、
なぜ意識が生まれないということを証明できるのかがよくわかりません。
意識の発生原理を満たさないことがわかる=意識の発生原理がわかっている?
と、そういった意味ではないのでしょうか?
この辺り、どうも私の理解が及ばない所なのかもしれません。
■質問3
字義の問題ですが、『ハードプロブレム』の指し示す内容に誤りがないか確認させていただきたいです。
『ハードプロブレム』とは、
意識というものがどのように論証されるべきなのかを考察するうえで
今現在、意識の存在をを証明したり、客観的に観測したりする方法はなく、
そればかりか、
将来的にも意識を客観的に観測する方法などイメージすらできない状態だ。
という八方ふさがり状態であることを提起したものだと考えています。
この認識に齟齬はございませんでしょうか?
もし、齟齬があるのであれば、正しい認識をお教えいただけるとありがたいです。
宜しくお願いいたします。
沼針様
さっそくの質問、ありがとうございます。
それでは、順に回答いたします。
ブログを読んでいただいているのでお分かりだと思いますが、ロボマインド・プロジェクトの目的は、人間と自然な会話ができるAIを開発することです。
決して、意識やハードプロブレムの解明を目的としているわけではありません。
なので、①~④ができたといってるわけではありません。
おそらく、沼針さんは、僕のブログの「ハードプロブレムが解決しました」という文言だけ捉えて解釈しているのだと思いますが、一度、僕のブログを最初から読んでいただければ、僕の発言が、どういった意図で語られているか分かると思います。
この点は、谷村省吾先生からも、直接指摘を受けました。
ここは、訂正したいと思います。
言いたいことは、ニューロンまで完全に同じ脳が再現できたとしても、意識が発生するとは言えないということです。
つまり、ハードウェア的に全く同じものを作れたとしても、意識は生まれないといいたかったわけです。
電子レベルまで同じ動きをするなら、ソフトウェアも同じといえるので、意識が生まれると思っています。
あっ、この点は、沼針さんと意見が違うことはわかっていますよ。
意識やハードプロブレムは、人によって考えが違いますからね。
これは、最初にも書きましたが、僕は、ハードプロブレムを解決しようと思ってるわけでもなく、ハードプロブレムの正しい解釈がどうかといったことにもあまり興味がないです。
そもそも、ハードプロブレムの正しい認識があるとは思っていません。
意識科学の分野は、まだ、はじまったばかりで、人によって解釈が異なりますし、沼針さんのような考えの人がいることは存じております。
最初にも書きましたが、僕の目的は、言葉の意味を理解し、自然な会話ができるAIを作ることで、その過程で、ハードプロブレムやクオリア、意識といったことと関わることがあるので、それをブログや動画で分かりやすく、面白く紹介しているわけです。
全体の流れから、意図を捉えていただければと思います。
>僕の提唱する「意識の仮想世界仮説」では、こういったことができないから、意識とは言えない、または、ハードプロブレムが解決されてないという形で説明していただければと思います。
ご存知かもしれないが、2018年に示されたハードプロブレムの解決方法の一例がある。
有識者からほぼ異論が出なかったため、ひとまずこれをクリアすればハードプロブレムは解決できたと言えるだろう。
貴公の作る装置が「意識」を持っていると証明する方法と読み替えた場合
貴公の作る装置を複数用意し、会話させる。
その装置内に芽生えた意識について装置同士で会話・論考され、
その結果、我々人間の誰もが理解できる「意識の発生理由」が出力されれば、
「この装置には、我々が感じているものと同質の意識というものを持っている」
と証明できるだろう。というもの。
どういう結果が得られればいいかについてすら不明だった頃に比べれば、指針ができただけでも大きな進歩だが、少なくともこれがクリアできなければ、ハードプロブレムがクリアできているとは言えない。
たーやんぽ様
コメント、ありがとうございます。
これは知りませんでした。ものすごく興味があるので、このことを書いた記事のリンクなどわかれば教えてください。
問題があるとすれば、ここですよね。
「誰もが理解できる『意識の発生理由』」です。
つまり、「意識のハードプロブレム」だろうが、数学の未解決問題だろうが、どんな問題でも、「誰もが理解できる『○○の解決方法』」を出せりゃ、そりゃ、解決したことになりますからね。
そんなことは、誰もがわかってるので。
>つまり、「意識のハードプロブレム」だろうが、数学の未解決問題だろうが、どんな問題でも、「誰もが理解できる『○○の解決方法』」を出せりゃ、そりゃ、解決したことになりますからね。
上記、2018年に提唱された証明方法がいかに画期的なものか、初見で少しも感激がなかったのであれば、貴公はハードプロブレムが何なのかをまったく理解できていない。思考前提がそのレベルに達していない。
>「誰もが理解できる『○○の解決方法』」を出せりゃ、そりゃ、解決したことになりますからね。
ならない。ならないということからこの問題がスタートしている。
チューリングテストの結果から内的体験の有無が判断できないために、ハードプロブレムが発生している。
ある装置が「我々人間の誰しもが納得できる色彩についての論理」を出力したからと言って、その装置が我々人間のクオリアと同質の体験を持っているとは言えない。他のクオリアについても同様、チューリングテストの結果から、内的体験の有無は判断できないと考えてきた。その論考の延長線上で我々はずっと「意識」についてもそうだと考えてきた。
ところが、装置の出力したものが「我々人間の誰しもが納得できる意識の、発生理由」であればどうか。
出力されたものを人間が見たとき「我々は何を納得したのか」という問題に演繹できる。という点が多くの者にとってコロンブス的転回であった。
もし何も感じないのであれば、そのとき我々は「何を納得したものと扱うことが出来るのか」をよく考えるとよい。
なお、上記の出典はクラクフのヤギエオ大で行われたASSCセッション22である。
概要ページのサイトURLをリンクしておく
たーやんぽ様
回答、ありがとうございます。
なるほど、たーやんぽさんが言いたいことが分かりました。
たしかに、その通りだと思います。
正直な感想をいいますと、僕は、意識か、意識でないかといった議論には興味がないんです。
人間と普通に会話できるAIを作ることが目的なんです。
それができれば、シンギュラリティとか、汎用人工知能になると思いますし、世の中が大きく変わると思います。
それができたとして、それに意識があるとか、ないとかには興味がないわけです。
意識がないと証明されたからといって、何が困るのか、僕にはよくわかりません。
なぜ、一部の人は、そこに、ものすごくこだわるのか、ちょっと理解できないんです。
まぁ、これは個人の趣味の話なんで、そういったことにこだわるのは、全く構わないと思いますよ。
>なぜ、一部の人は、そこに、ものすごくこだわるのか、ちょっと理解できないんです。
>意識がないと証明されたからといって、何が困るのか、僕にはよくわかりません。
以下、貴公もご承知の内容であると思うが、前提として書き置く。
意思や思念など霊的なものが突如物理の世界に介入し、物理法則に反する動きのトリガになる、というオカルトを長らく「念力」と呼んできた。その点、我々の「書き込みを投稿しよう」という意思が、脳という物質内部にニューロンを突如発火させ、その結果、指が動きタイピングが行われるという一連の流れのトリガは、念力にあたる。
50年ほど前までは、脳科学者の間でさえ、これら「念力」の存在が当然のこととして信じられていたが、ここ半世紀ほどで行われた『意思や思念などが(脳という)物理世界に介入しているとするならば、その証拠として脳という物質内において「既存の物理法則上、不自然な振る舞い」が発見されねばならない』という旨の数々の実験により、「念力」の存在が完全に否定されつつある。
これらの実験結果の蓄積を受け、「人間の意思は、その行動をコントロールできない」ということについては「証明はされていないが、おおよそ事実なのではないか」と関係者に受け止められつつある。
ここまでは貴公もご承知のことであろうと思う。
ことに近年、この「自由意志は存在しなかった」という趣旨の書籍が多数出版されたため、特に科学者でなくともこうした知識を有している者は少なくないと考えられる。
ここから、貴公がお持ちの、なぜ一部の人がそんなにも拘るのか、何が困るのか、という問題に対して書き置く。
意識に関する問題には様々な懸念が付きまとうが、その中から一例を挙げる。
「人間の意思は人間の行動をコントロールできない」ということがより一層明確となり、このことが事実として人口に膾炙していくことで、最も混乱が巻き起こると予測されている分野が刑事責任の分野である。
我々の意識が肉体を動かせないということが明らかになるにつれ、犯罪行為を含むすべての動作は単なる物的因果(物理現象)の一環でしかないという結論に近づいている。
質量を生みつつ宇宙をフォーマットしていったビッグバンの際のエネルギーは、意思など霊的なものに汚染されることなく、物理的因果から一切逸脱せず今まで連綿と続いているという前提において、凶悪犯罪を犯した人物は、(念力が存在するのであればまだしも)物理的な環境下において彼に凶悪な犯罪を犯す以外の選択肢など用意されてはいない。すると、その行動も必然性な帰結ということになる。この場合、彼の意識に責任はあるのか。
このことから、司法が改悛の情を認めたり情状を酌量したりするのは不適切であり、「社会を構成するパーツとして不良な部品があれば、社会から取り除くという選別作業が、司法である」(意識を裁くわけではなく、不都合な人体を裁き、処分するためのプロセス)と再解釈すべきではないかという意味論に発展している。
なお、こういった脳神経科学と人倫道徳の接点に位置する学問分野が以下のものである。
https://ja.wikipedia.org/wiki/%E8%84%B3%E7%A5%9E%E7%B5%8C%E5%80%AB%E7%90%86
人間の主体的な意識に行動の責任など存在しないということが常識となった場合、人には罪も功もなく感謝する必要も憎悪する意味もないという価値観が少しずつ浸透し、このパラダイムシフトが結果的には現在の人倫モデル(良い事・悪い事)を緩やかに崩壊させ、さらには社会秩序に悪影響を及ぼすのではないかと懸念されている。(そう考えない者も多くいる)
ところが現在のほとんどの国家の司法は「物理的に不可能な証言は無効である」としながら、「自由意志(念力)は存在する」と二律背反を抱えたまま運用されており、「意識の研究がどのように進むにしろ、司法の姿勢を矛盾を抱えた今のまま放置することはできないのではないか」と考えられたり、「現状の矛盾を補強する理論が必要である」と考えられたりしている。
このことから、少なくとも、現在予想されている人倫モデルの崩壊を「困る」と考える人たちは、「意識というものが物理モデルのどこに位置するのか」の研究に血道を上げている。(こだわっている)
なお、以下は小生の個人的な意見である。苦言を呈してはいるが攻撃の意図があるわけではないから、心理的負担になるようであれば無視して構わない。
「意識のハードプロブレム」という問題は、
1「脳内の物理的な状態変化に付随する、クオリアや意識というものは一体何なのか」
2「意識というものは、現在の物理モデルにおいて、どのように記述されるべきものなのか」
という内容のもので、この用語をご存じであるからにはすでにご承知のことと思うが、米国アリゾナのセッションにおいて1994年に提唱されたものである。
つまりこの問題は、多くの科学者の間で「解決できない謎」として意識されていたものに対していつからか自然発生的についたラベルなどではなく、提唱者が公の場で定義を明示しつつ提唱した問題であり、少なくとも「人によって解釈が異なる」というような種類の問題ではない。
確かに、これは何も貴公だけでなく、殆どの人にとって「どうでもいい」問題であろう。
そのため、貴公がご発言の通り「一部の人は、そこに、ものすごくこだわる」という、一部の人にのみ熱心に扱われる議題となっている。
貴公が他の殆どの人同様、この問題が重要であるとも思えず、そのため興味を抱くこともできない、と言うのであれば、(指し示す内容が内容であるゆえ)それも仕方のないことであり、無理に興味を持つ努力をする必要はないものと考える。しかしながら「意識のハードプロブレム」という用語を印象的に用いて他者の関心を引こうとするのであれば、少なくとも「意識のハードプロブレム」という語句は正しい理解に基づいて使用される必要があるのではないだろうか。
たーやんぽ様
丁寧な回答、ありがとうございます。
僕のブログに長いコメントを書いてくださる方が時々いらっしゃるんですが、共通点がありまして、そういったかたは、なぜか、僕のブログの中身やYouTubeを、ほとんど見ていないようです^^;
僕の主張を見ずに、自分の主張のみ述べるというパターンが多いのですが、今回も、同じパターンとなっているようですね。
もちろん、自分の主張を述べるのは構わないのですが、それなら自分のブログに書いていただければと思います。
僕のブログのコメントに書くのでしたら、あなたは間違ってると挨拶程度に一言述べるだけじゃなくて、どの主張のどの部分が、どう間違ってると具体的に指摘していただけないと、議論にならないと思います。
意識のハードプロブレムに関しては、「解決!意識のハードプロブレム①~⑥」として、ブログとYouTubeで僕の考えは述べております。
自由意志に関しては、「自由意志は存在するか?①~④」としてブログとYouTubeで語っております。
まずは、そちらをご覧いただき、その上で、どの動画のどの主張がおかしいといった意見を述べていただけたらと思います。
どうも、文系や哲学寄りの方にこういう傾向があるように思います。
「解決!意識のハードプロブレム⑥」でも語っておりますが、哲学者ジョン・サールなんかは、コンピュータのことをあまり理解せずに、AIを批判しているようで、正直、それは、あまりにも勉強しなさすぎじゃないかと思ってしまいます。
その点、理系の方の反論は、具体的な指摘になってるので、議論しやすいことが多いです。
例えば、「意識のハードプロブレム」に関して、僕の根本的な考えは脳と意識の関係は、コンピュータのハードウェアとソフトウェアの関係だというものがあります。
この点に関して、YouTubeの第一回にあたる「決着!谷村ノート 物理学 vs 哲学」にて、谷村先生本人から明確な指摘があり、その点に関して僕が修正したということがありました。
詳しくは、この記事のコメント欄を参照していただければと思います。
まとめますと、コメントいただくのはありがたいのですが、その際は、僕の主張のどの点に関して、間違ってるとか、疑問があるとか、そういった点を中心にコメントいただけると嬉しいです。
自由意志と司法の点に関しての個人的な感想も書かせていただきます。
自由意志がないことが証明されたら、もしかしたら、今まで懲役3年だったのが無期懲役になるかもしれませんし、それはそれで、一部の人には、ものすごく大変なことになると思いますが、僕個人としては、司法がどう変わるかには、あまり興味がわきません。もちろん、自分にも関係することだとは思いますが、興味が持てないのは仕方ないですよね。
そんなことより、僕の関心は、意識をいかにして作るかってことでして。
抽象的な意識の議論には、少々、飽きてきております。
そろそろ、具体的な意識モデルの議論とか、しないのかなぁと常々思っております。
具体的に意識をどうやって作るかってことに興味があるのは、どうも、この分野には、ほとんどいないようですねぇ。
まぁ、うるさい輩につきまとわれて大変ですねぇ。同情します。
でもうるさい輩につきまとわれる原因はこのページにありますよ。きょうは知り合いの書き込みを見たので彼女のフォローもかねて輩が集まる真因について書いてみます。
このページは【意識のハード・プロブレム】でGoogle検索すると一番上にくるページだから、研究者がちょっと覗いていこうとなっちゃうんですよねぇ。
【僕たちが必死で解決しようとしている問題を簡単に解決したというコイツは一体全体どんな天才なんだ????】となるわけ。
ところが、読み進めると、???????んんんんんんんん?あらら、と、なってしまう。
彼らは【意識のハード・プロブレム】が解決されたということだけに興味を持ってこのページに来ているわけだから、それ以外の事には全く興味なんかないわけです。
だから【意識とは、物理領域における〇〇と〇〇との間に位置するもので、〇〇が満たされることによって〇〇のエネルギー消費を伴って〇〇が〇〇の期間、〇〇が〇〇の座に発動する現象であり、〇〇を〇〇することでその濃淡とゆらぎを観測することができる。意識を観測する指標としては〇〇に対する〇〇の〇〇らしさを指し示す〇〇と…】というような、物理領域での扱われ方についてのことに触れていないと…
ジジイは【おっと、これは詐欺だ!何も解決できていない】とか経験則で判断してページを閉じるわけだけど
でもピュアな若人はガッカリするだけでなく【この人はこれで意識のハード・プロブレムが解決したと勘違いしているのかもしれない】と余計な心配をしてしまう
たとえば、たぶん上で書いているターヤンポさんは僕の知ってる子なんだけど、彼女のような日本での生活が短い学生さんは【雰囲気から察して見なかったことにする】日本の事なかれ文化なんてわからない。
まだ若くてピュアでいたいけな(おっと!)学生さんなので老婆心(おっと!)ならぬ親切心から、スルー出来ずにあらぬおせっかいをしてしまうというわけ。(これも一種のフレーム問題だね)
【なんでこの人は自分でわからないと書いたことを教わっても間違っている点を指摘されても勉強せずにいるんだろう】と不思議に感じちゃってるくらいピュアなんだ。
まぁあの書き込みは彼女の作ったアプリで自動生成した文章なんじゃないかと僕はニラんでるけど。彼女がこんな難しい日本語かけるわけないし(;^_^A
ということで彼らはただ【意識のハード・プロブレムっていうワードを間違ってタイトルに使ってますよ】と言いたいだけで、べつに議論をしたいわけじゃないんだよね。
で【意識のハード・プロブレム】ってワードを理解していないってことを彼らが愚直に説明しようとしちゃってるから相手には【意識の有る無しに拘ってる】ように見えちゃうってことなんですね。
だからいきなり【あなたの装置に意識が芽生えたことが客観的に証明できません!】なんてことを書き始めちゃう(^^;
そもそも【意識のハード・プロブレム】を理解していない人に突然そんなこと言っても…相手にとっては【意識があるとかないとか何を突然関係ない事言ってるんだこの人は】となっちゃうってことに気づいてない(^^;
あなたは【具体的な指摘がない】と感じているようですから、ここをわかりやすくもう一度具体的に書いておきますね。
【意識のハード・プロブレムっていうワードを間違ってタイトルに使ってますよ】っていうのが具体的な指摘ですよ(^^;
ただ指摘している方にも問題があると思いますね。
ここにコメントしている人たちは究極的には【意識のハード・プロブレムっていうワードを間違ってタイトルに使ってますよ】ってことを指摘しているんですけど、相手が【意識のハード・プロブレム】が何かを理解していないという前提をまるっきり無視して自分のレベルで話をしてしまっていますね。若い人はえてしてこうなりがちです。
ともかく抽象的でも何でもないのでもう一度言っときますね。
【意識のハード・プロブレムっていうワードを間違ってタイトルに使ってますよ】っていうのが具体的な指摘です。
そしてこれは、うるさい輩にしつこくつきまとわれる真因でもあるでしょう。
あなただって自分の言いたいこととは関係ない字義にこうしたツッコミを受け続けたらさすがに飽きちゃいますよねぇ。
でも【間違いを教えてあげよう】という輩ならいるでしょうが【意識のハード・プロブレム】っていうワードを間違ってタイトルに使っている人と【具体的な意識モデルの議論】をしようという人はさすがにいませんf^_^;
それに【意識のハード・プロブレム】をGoogle検索してタイトルに反応してやってきた人を相手に【タイトルに脊髄反射せず、まずは僕の主張をちゃんと読んでから発言してください】というのも、かなり無理があると思うわけです。タイトルで書かれていること以外にはまったく興味ないわけで、【意識のハード・プロブレムっていうワードを間違ってタイトルに使ってますよ】ってことだけを言いたいわけだから…
僕が考えるに【問題の原因を分析して真因に対して対策を練る】のであれば【意識のハード・プロブレム】に特段の拘りがないようですし、このページのタイトルを変えるのがいいと思います。
多くの輩にとって【意識のハード・プロブレムっていうワードを間違ってタイトルに使っている】こと以外、そもそも貴方の主張に興味があるわけではないのだから輩も訪れなくなります。
輩はあなたの主張に興味があるわけじゃないので反論も文句もあるわけないし、ましてやYoutubeなんて見るわけないんですから、もともとあなたにとって毒にも薬にもならない存在です。これでピタッと輩は消えるはずです。
あとこれは僕の勘だけど。あなたの感じているギャップは【文系/理系】という括りではなく【基礎/応用】というギャップではないかな。
たとえば、どんな【価値】のためにどんな活性化関数を想定するとか、こういう【目的】なのだからスキームはこういう構造で蓄積されていくべきだとか、こういう【意味】を抽出するためにはこういう勾配のためにこういう調整期を用意すべきとか…基礎側の人ってそういう事ばっかり言うよね。だからいつも話が抽象的な価値とか目的とか意味とか概念に関することばっかりで文系っぽい話になりがち。作ろうとしているものが【理論】だからですね。反省します(@_@;)
それに対して既存のRNNとか言語とか理論を使って実際に役立つツールを考案しようとする応用側は現実の問題を解決するための視点で話をしているから、話は具体的で各論的で一つのポイントのみに的を絞った局所的な話になりがち。作ろうとしているものが【ツール】だからですね。
まぁ、応用側が【このことについてだけ】話をしてるのに基礎側が抽象的な観念論やアーキテクチャの課題とかに話を発展させて応用側をイライラさせちゃうっていうのは、あるあるだよねぇ。
そこで立ち返っていただきたいのは【意識のハード・プロブレム】ってワードが主にどっち側で使われるものなのかだね。応用側の人は【そんなもんどうでもいい】と感じるんではないかな。基礎側の人ばっかりが来ることになっちゃうのも頷けるよね。
P.S.
僕が何にびっくりしたかって、杨さんの日本語です
僕が誰だかわかります?320です
この日本語って杨さんのLSTMのやつで生成した日本語だよね????
正直杨さんの100倍は日本語上手い(失礼!)
まだまだ文体に不自然なところはあるけど…文法は完ぺきだし本物の日本人が書いたと信じる人がいてもおかしくないと思うよ!
きょうはそれにびっくりして思わず書き込んでしまいました。
コロナいろいろ大変だけどお互い頑張ろうね。
k@320様
コメント、ありがとうございます。
また、強烈な方が来られましたねぇ。
嫌な予感しかしないです^^;
それは、逆ですよ。
Google検索で一番上に来るように、釣りタイトルにしてるわけです。
こうやって、皆さんが逆上して、コメントを書いてくれればくれるほど、検索上位になるわけです。
k@320さんも、協力して、こんなに長いコメントをいただき、ありがとうございます。
感謝の言葉しかありません。
どうも、k@320さんは、根本的な勘違いをしておられるようですね。
僕がやってるのは基礎ですよ。
「意識の仮想世界仮説」っていう画期的な意識理論を提唱してるんですよ。
あぁ、そうでしたね。
k@320さんは、僕の主張に興味もなく、ましてやYoutubeなんかみてないんでしたよね。
それにしても、「あなたの主張になんか興味もない」って、完全に開き直って、しかも、相手のコメント欄に、それを堂々と書くとは恐れ入ります。
もちろん、これはジョークで言ってるのは分かるのですが、こんなジョークが出てくることからして、k@320さんは、現在のAIのことを全く理解してないようですね。
どうも、素人レベルの理解のようです。
僕の主張に興味がなければ読む必要はないですけど、AIのことを話すなら、少しは、自然言語処理の勉強をされた方がいいと思いますよ。
釣りタイトルのおかげで、今日も、大物が引っかかりました^^
ネット文化の文脈とやらを盾に、卑劣な釣りタイトルを正当化するクズ
こういう雑魚って本職の人間との議論になると、必死になって議論の焦点をオリジナル理論(笑)に持ち込もうとするよな
おっと、ここはブログのコメント欄なんで、僕のコメントもネット文化の文脈に即して理解してくださいね。
・・・って言われたらどう思います?
釣りタイトルが悪いものなのはわかりますよね。
ネット文化だろうと、新聞やネットニュースでもよく使われる手法だろうと、悪いものは悪いです。
金川様
コメント、ありがとうございます。
オリジナル理論の「意識の仮想世界仮説」を議論したいのは分かってもらえてるようですね。
そこまでわかっていて、なぜ、「意識の仮想世界仮説」の議論を必死になって避けるんですか?
そんなに難しい説でもないと思いますけど。
このことを議論すると、何か、問題でもあるのでしょうか?
賛同して、後から「意識の仮想世界仮説」が否定されたり、逆に、否定して、後から「意識の仮想世界仮説」が認められるとかっこ悪いとかでしょうか?
自分の意見を持てない人は、たぶん、そういうことばかり気にするんでしょうね。
そんなことより、釣りタイトルは悪いだろって、あたりまえの意見を振りかざすだけの方が楽ですしね。
そんな人ばかりなので、「意識の仮想世界仮説」は誰にも論破できないって僕が天狗になるわけです(笑)
金川さん、悔しかったら、論破してみてください(大笑)
横から失礼します。
このコメント欄で起こっている論争の原因は、このブログのタイトルにあると思われます。
田方さんが研究されている「人間と自然に会話できるAI」というテーマに置いて、
AIと人間の自然な会話を実現するには意識のハードプロブレムという壁があります。しかし、田方さんの「意識の仮想世界仮説」を用いれば、それをうまく回避する事ができた。
そういった意味で、ブログタイトルを「意識のハードプロブレムを解決した。」というふうにしたのでしょう。
しかし、「クオリア」や「意識のハードプロブレム」で検索をしていた人たちは、このブログをみて、「え?意識のハードプロブレムが解明されたのか?」誤解してしまったものと思われます。
ここで認識の差が生まれてしまったことで、コメント主と田方さんの会話がうまく噛み合わず、議論が進まないのだと思います。
そもそもの話がずれているので、両者とも意味のわからない主張だと感じてしまうのでしょう。
炭酸さま
コメントありがとうございます。
少し誤解があるようです。
「意識の仮想世界仮説」を使って「意識のハードプロブレムを解決した」のですが。
意識の仮想世界仮説だと、意識のハードプロブレムがなぜ、解決してないと思ったのでしょうか?
具体的に説明していただけないでしょうか?
炭酸さまとは別の人間ですが、私見を述べさせていただきます。
この論争の根源は、田方さまの立ち居地とご発言が矛盾しているように見えるためだと思われます。
田方さまの立ち居地は、「チューリングマシンをパスする機能は意識を宿しているものと判断できる」というものとお見受けしました。この解釈自体は行動主義・機能主義的には理にかなったものですので、かつて多くの人に支持された立ち居地ですが、現象的意識の存在がまるっきり無視されているため「私たちの持つクオリアや現象的意識が機能内で発生していることを客観的かつ定量的に物理領域で扱うための基礎理論が必要である」ことが問題視・提唱されました。これが「意識のハードプロブレム」です。
そして、ここが重要なことですが、「意識のハードプロブレム」とは、もともと「機能主義や行動主義の視点だけで意識をすべて網羅することが可能」とする姿勢を批判するものですので、「解決した」と主張すると自動的に「意識のハードプロブレム」の存在・解決の必要性を認めたことになってしまいます。(おそらく、ここが一番のポイントなのではないかと思います)
さて、田方さまの手法は
(A) : 機能を開発 → 客観的かつ定量的に現象的意識の存在を観測
ではなく、
(B) : 機能を開発 → チューリングテストをパス
というものであると、読み取れます。
(B)の判定方法は機能主義的(または行動主義的)な知見に立脚されたものであり、「意識の存在を証明するためにクオリアの客観的観測など必要ない=(A)の手法は必要ない」という立場のものですので、「意識のハードプロブレムなど、もともと存在しない」という立ち居地でないと主張と立場が矛盾してしまいます。(そうでなければ意識の存在は証明できていないことになります)
いっぽう意識のハードプロブレムは「(B)の手法では意識の存在を証明できない」とする立場から提唱されていますので、「意識のハードプロブレムは存在する」と認めるのであれば、「(A)の判定方法をとる必要がある」という主張をしないと、こちらも立場に対して無意味な主張をしていることになってしまいます。
もし、田方さまが「チューリングマシンをパスする機能は意識を宿しているものと判断できる」という立場でなく、「私たちの持つクオリアや現象的意識が機能内で発生していることを客観的かつ定量的に物理領域で扱うための基礎理論が必要である」という立場から、「意識を物理的領域で扱うための定義や存在の確からしさに関する単位など、一そろいの基礎理論を構築した」ということであれば、タイトルには誤りがないこととなりますが、今度はそのことが本文から読み取れないことに問題があるということになるかと思います。
ご参考になればと思います。
梅津様
コメント、ありがとうございます。
この記事だけから読み取れないとのことでしたら、おっしゃる通りです。
この記事だけでなく、YouTubeを見ていただければ、意識のハードプロブレムは、意識の仮想世界仮説で解決したことが、梅津さんにも理解できると思います。
ぜひ、以下のリンクからYouTubeを全てご覧の上、反論していただければと思います。
https://www.youtube.com/c/ROBOmindProject
早速のご返信ありがとうございます。
誤解させてしまったのであれば申し訳ございません。
今回は、こちらの論争の原因について私見を述べさせていただいたに過ぎず、田方さまの主張に反論があるわけではございません。本ページのタイトルがYoutube上での主張を要約したものなのであれば、Youtubeでの主張をここに書き記すことで、こちらの論争は解消されるかもしれませんね。
(なお、田方さまのYoutubeチャンネルを拝見しました。蛇足になりますが、チャンネルの印象としましては、収益モデルを意識したものではなく、フォロワーとの交流を主眼としているものとの私感です。ですので、Youtube上での主張をこのページへ展開しないとなれば、「Youtubeへの誘導によってインカムを増やそうとしている」と受け取られる可能性より、むしろ、「主張の誤謬はあくまで計算上の演出であり、Youtube誘導によって収益を増やすための釣り針でした」と最低限の自尊心を守るための言い訳として活用しようしているように受け取られてしまう可能性のほうが高いのではないかと感じます。この点、もう少しYoutubeチャンネルは収益を意識した作りにしておいたほうがいろいろな意味で無難であるように思えました)
あくまで私見ですが、ご参考になればと思います。
梅津様
お返事、ありがとうございます。
YouTubeのチャンネル収益の指摘を受けたのは初めてです^^;
広告も出してないのに、なぜ、チャンネル収益の話がでてくるのでしょうか?
ちょっと、何を言ってるのか意味がわからないです。
そんなどうでもいいことでなく、できれば本質的な議論をしたいのですが、どうして、皆さん避けるんでしょうね。
これだけ、「意識のハードプロブレムは、意識の仮想世界仮説で解決した」って繰り返してるのに、なぜ、誰一人、「意識の仮想世界仮説では、意識のハードプロブレムのどこどこが解決されてないって」意見を言わないんでしょう?
なぜか、みなさん、そういった本質的な議論は一切避けて、言う事と言えば、「タイトルを変えろ」とか、「YouTubeに誘導して、収益を増やしてるんだろ」とか、もう、見当はずれのことばっかりで。
まぁ、たぶん、これだけ言っても、本質的な議論は避けるでしょうが。
現に、梅津さんは「こちらの論争の原因について私見を述べさせていただいたに過ぎず、田方さまの主張に反論があるわけではございません」と完全に逃げ腰ですしね。
僕の主張には反論はないけど、YouTubeで収益化には反論があるようですけど。
なぜ、そんなどうでもいいことに反論して、肝心の中身には反論しないのでしょう?
「意識の仮想世界仮説は、意識のハードプロブレムを解決していない」と正面から反論できないから、それを避けてるとしか考えられないですが、違いますか?
このコメント欄を見れば分かると思いますが、いままで、何人もの人が、「意識のハードプロブレムは解決していない」と言ってきています。
それに対して、「では、どこが解決していないか説明してください」といったとたん、返事がなくなります。
意識の仮想世界仮説で、意識のハードプロブレムが解決したって認めるのが悔しいから、その議論を避けているんですよね。
もし、間違ってたら、意識の仮想世界仮説のどこが間違っているのか教えてください。
そうでなくて、「おっしゃる通りです。反論の余地がないけど、認めるのが悔しいから、どうでもいいことを突っ込んでしまいました」というのでしたら、もう、これ以上、お答えしていただく必要はないですよ。
梅津さん。
ご返信ありがとうございます。
>できれば本質的な議論をしたいのですが、どうして、皆さん避けるんでしょうね。
私なりの解釈で恐縮ですが
「なぜ、肝心の中身には反論しないのか」
「本質的な議論を避けるのか」
についてわかりやすく例えを引いてみますね。
以下のようなシナリオを考えます。
1)2023年10月から採用されるインボイス制度を理解し、
適切な節税対策を準備するため
「消費税 節税 方法」でGoogle検索をしたとします。
2)検索結果、
「究極の節税方法、〇〇法!合法的に消費税を脱税する方法!」
というタイトルのページを発見したとします。
3)タイトルの文言から、
主目的とは無関係な記事であることが推測されたものの、
危ういタイトルに興味が沸き、アクセスしたとします。
4)該当の記事は、閲覧者にとって興味を充足させないもの
たとえば「一切消費をしない〇〇法を採用すれば、
消費税を払う必要はなく、合法的に脱税できるのです」
というような主旨であったとします。
閲覧した感想としては、たとえば
・納税義務を回避することが脱税なので、
『消費しない』という手法では
そもそも納税義務が発生せず論理的に脱税は不可能。
・そもそも脱税は違法行為なので、
『合法的に消費税を脱税する』
というタイトル自体が自己矛盾している。
というようなものになるはずです。
これらの感想から「合法的に消費税を脱税するというタイトルがおかしい」、「本文に書かれていることは脱税ではない」という率直なコメント投稿が行われることとなります。
(ここが一番のポイントだと思っているのですが)これらコメント投稿を行った方々は、本質的な中身である〇〇法の中身にはまったく興味がなく、したがって意見もなく、○○法についての更なる詳しい説明も一切必要としていません。
さて、結果として「タイトルがおかしい」「これは脱税ではない」という、言葉の使い方レベルの指摘に対し「なぜ○○法では消費税を合法的に脱税できないのか、○○法が論理破綻しているというのであれば、その箇所を具体的に示してください」という回答を得ることになりますが、これはコメント投稿者にとっては過剰反応でしょうから、再投稿によって再び言葉の使い方レベルの指摘へ話題を引き戻すこととなります。(これが逃げ腰ということになります)
総括ですが、コメントを書き込んだ方々は、○○法にの中身に対しての指摘をしているわけではなく、タイトルや本文についての率直な指摘を行っている感覚だと思われます。そのため、この段階では「○○法によって合法的に消費税を脱税できるかできないかは問題にしたつもりはないし、今のところどっちでもよい」と考えているはずです。語句の認識が乖離したままの現段階で、より突っ込んだ○○法の是非について時間や労力を割いて意見交換をするつもりはない、というのが実情ではないでしょうか。
以上が、「本質的な問題には絶対に反論しない」理由であると私は考えていますが、雰囲気だけでも伝わりましたでしょうか。
長くなってしまいましたが、できるだけわかりやすく細かく説明したつもりです。
>僕の主張には反論はないけど、YouTubeで収益化には反論があるようですけど。
誤解させてしまったのであれば申し訳ございません。
とくに収益モデルを意識していない作りに反論があるわけではありません。
ただ、収益を意識したチャンネルとなっているほうが、「当該ページで説明せず、わざわざYoutubeへと誘導する動機」としては「再生数を稼ぐため」と自然に感じられるということと、逆に、広告プログラムを導入していないと「記事での誤謬は意図的なものであり、こうした釣りによって炎上させ、Youtube再生数を稼ぐ作戦でした」という言い訳も難しくなってしまうので、百害あって一利なしなのではないか、という私見になります。
他にもなにか疑問がございましたら、私見ではございますが、
できるだけ回答させていただきたく思いますので、ご遠慮なくお申し付けください。
ご参考になればと思います。
梅津様
返信、ありがとうございます。
申し訳ございませんが、この場は、意識のハードプロブレムについて議論する場となりますので、意識のハードプロブレムと関係ない話を長々と書くのはご遠慮いただけたらと思います。
まずは、本記事にもリンクしておりますYouTube「43.解決!意識のハードプロブレム⓵」をご覧ください。
かなり分かりやすく意識のハードプロブラムの解決策を示しておりますが、この考えでは、「意識のハードプロブレム」は解決されてるとお考えでしょうか?
もし、解決されていないとお考えでしたら、具体的に、どの部分が、どのように問題なのかについて説明してください。
どうぞよろしくお願いいたします。
ご返信、ありがとうございます。
動画を拝見いたしました。
結論から申し上げますと、動画の内容では「意識のハードプロブレム」を問題視できません。
したがって「意識のハードプロブレム」を解決することはできません。
できるだけ詳しく説明させていただこうと思います。
この書き込みでは、まず「意識のハードプロブレム」とは何かを解説いたします。
Facing Up to the Problem of Consciousness (1995)
http://consc.net/papers/facing.pdf
こちらの論文が「意識のハードプロブレム」と呼ばれる提唱の原本になりますので、この論文において「ハードプロブレム」と呼ばれているものを「意識のハードプロブレム」として解説いたします。
最初に「意識のハードプロブレム」の前提を説明します。
「意識のハードプロブレム」は、以下の主張を持つ人には向けられていません。
つまり、以下のような立場の方は「意識のハードプロブレムを認めない」という立場となります。
1) 古典的な心身二元論が正しいと主張する立場。
つまり、「意識(霊魂)というものは肉体や脳などの物理的な要因とは無関係に存在する」
というような哲学的または超自然的な立場です。
(「意識のハードプロブレム」は、「現象的意識は物理領域の状態と何らかの関係がある」としたうえで、
「同一の条件下では常に等価に事象が再現される」という法則性と客観性を尊重する科学的な立場をとる人だけが
頭を抱える問題であり、その他の人にとっては問題となりません)
2) 物理主義的一元論(機能主義や行動主義やタイプ物理主義など)を主張する立場。
つまり、内的な体験である現象的意識などは現実には存在せず、
物理的な状態変化こそが意識そのものであり、それ以上説明すべきものは何も残っていないとする立場です。
自らを哲学的ゾンビであると主張したり、マリーの部屋において「何も新しいものを学ばない」とする立場の人も含みます。
(「意識のハードプロブレム」は、物理法則の領域では説明できない現象的意識というものが現実に存在する、
または「少なくとも私には確かにそのような体験があるように思われる」という立場をとる人だけが
頭を抱える問題であり、その他の人にとっては問題となりません)
3) 意識についても物理法則に対し還元的なアプローチを取ることが出来るという立場。
2)でいう「物理法則の領域では説明できない現象的意識」の存在は認めるが、
「これはいずれ物理学の発展によって解決できる」という立場で、ご紹介いただいた動画にもありましたが、
「脳の内部における物理的な状態変化が完全に解明できれば意識はすべて解明できる」という立場です。
(「意識のハードプロブレム」は、「物理法則に還元することが出来ない」という立場をとる人だけが
頭を抱える問題であり、その他の人にとっては問題となりません)
上記3つのどの立場でもない人は、「科学的に意識を解明しようとしている」(よく「正面から意識の問題に取り組む」と和訳されています)はずですので、論者と問題意識を共有できるというわけです。
3)についてのみ、少し補足します。
「意識のハードプロブレム」は、そもそも3)の立場による還元的なアプローチを批判するもので、上記論文の序文より引用しますと、
”I critique some recent work that uses reductive methods to address consciousness, and argue that these methods inevitably fail to come to grips with the hardest part of the problem.”
(”意識を解明するために還元的方法を使用している最近のいくつかの研究を批判するとともに、これらの方法では必然的に問題の最も難しい部分を理解することができない、ということを主張します。”)
という主張の論文となりますので「還元的手法では解明できないもの」が、この論文における「ハードプロブレム」である、という構造になっています。
では次に「還元的手法では解明できないもの」として、具体的にはどのようなものが挙げられているのかをまとめてみます。
A:物理的状態から、どのようにして現象的意識やクオリアを感受・観測・体験する我々の主体が生まれているのか。
現象的意識の発生条件やエネルギー消費量や発生期間や発生位置、クオリアの濃淡や質に関わる法則や、
意識の有無を客観的に確認する方法など、意識に関わる法則。
B:現象的意識が物理的状態と何らかの関係性を持つ(脳による刺激と知覚体験には再現性がある)以上、
既存の物理法則との接点があるはずである。
意識に関わる法則は、既存の物理法則と、どこでどのように接するのか。
これらを「還元的手法では解明できない」問題の一部として挙げ、このような問題をまとめて「ハードプロブレム」と総称しています。
(これらも還元的手法で解明できるという主張は、「脳の内部における物理的な状態変化を完全に解明できれば意識はすべて解明できる」とする3)の立場になりますので、「ハードプロブレムなど最初から存在しないので、何も問題などない」という立場となります)
それに対し「還元主義で解明できる」問題を「イージープロブレム」として列挙していますが、端的に説明している一文がありますので引用します。
”The easy problems are easy precisely because they concern the explanation of cognitive abilities and functions.”
(”イージープロブレムがイージーな理由は、それらが認知能力と機能の関係性について解説するものだからです。”)
以上、ここまでが「意識のハードプロブレム」についてのご説明になります。
続いて、ご紹介いただいた動画の内容と「意識のハードプロブレム」が無関係であり、したがって「意識のハードプロブレム」を解決していない、ということについて、次の投稿で説明させていただきますので、もうしばらくお待ちいただければと思います。
<動画のご主張とハードプロブレムについて>
動画より「脳というハードウェアのうえに存在するソフトウェアが意識である」というご主張であると認識しました。
「脳というハードウェアのうえに存在するソフトウェアの働きこそが意識であり、
意識に関して、それ以上補完すべきものは何もない」という意味であれば、
前述2)の「物理的なはたらきが意識そのものだ」という主張ですので、
この主張を行う以上、「意識のハードプロブレムなど、最初から存在しない」ことになります。
ただし、もし「意識に関して、それ以上補完すべきものは何もない」という主張でなく
「補完すべきものは確かに存在するが、それが何であるかは科学的に解明できない」という主張であり、
なおかつ、その「補完すべきもの」が「既存の物理法則では説明できない主観的体験やクオリア、
現象的意識やそれを受容・観測・体験する主体」ということであれば、2)ではないこととなります。
また、「意識の機能的役割は、脳というハードウェアのうえに存在するソフトウェアの機能的役割と言える」
という意味であれば、脳の機能的側面のみを限定的に物理法則に還元しようする試みとなりますので、
そもそも「主観的体験やクオリア、現象的意識やそれを受容・観測・体験する主体」に触れていません。
行動主義・機能主義的な観点から、「脳の内部における機能的な側面を完全に解明できれば意識はすべて解明できる」
という主張であれば、3)の「物理法則に対し還元的なアプローチを取ることが出来る」という主張となり、
この主張を行う以上、「意識のハードプロブレムなど、もとより存在しない」ことになります。
ただし、これは「機能は、物理的な装置(脳)によって実行される必要がある」前提でのお話です。
もし「機能は、物理的な装置に依存せず、エネルギーや時空間・質量などと無関係に実行されるものであり、
その結果、物理領域外に生成されたものが意識である」というご主張であれば、これは心身二元論という立場となり、
こちらも「意識のハードプロブレムなど、もとより存在しない」ことになります。
(なお、ご紹介いただいた動画の中でも触れられている「オッカムの剃刀」は、還元主義の基本となる考え方ですので、
「還元で説明できないものをハードプロブレムとする」という主旨からは完全に逆行します)
「還元」は、オッカムの剃刀や地動説などを用いてご説明されていた通りなのですが、「非還元」は少々イメージしづらいかもしれませんので、先にご紹介した論文の第六章 Nonreductive Explanation(非還元的解説)からポイントをいくつか引用して解説しておきます。
”For example, in the nineteenth century it turned out that electromagnetic processes could not be explained in terms of the wholly mechanical processes that previous physical theories appealed to, so Maxwell and others introduced electromagnetic charge and electromagnetic forces as new fundamental components of a physical theory.To explain electromagnetism, the ontology of physics had to be expanded. New basic properties and basic laws were needed to give a satisfactory account of the phenomena.”
(”例えば、19世紀のことですが、それまでの物理理論による機械的なはたらきでは電磁気のはたらきを完全に説明できないことが判明したので、マクスウェル達は物理理論の新しい基本的な構成要素として、電磁電荷と電磁力を導入しました。電磁気を説明するためには、物理学のオントロジーを拡張しなければならなかったのです。新しい基本的な性質と基本的な法則が、現象の満足いく説明のために必要とされました。”)
この、「還元できないということから、新しい基本的な構成要素を用意する必要性を認め、物理学のオントロジーを拡張する」ということを「非還元」と呼んでいるのです。
いっぽう、動画で言及されているアプローチは、
1)還元的アプローチで意識を解明できるという主張である
2)物理的なはたらきが意識であるという主張である
ため、「意識のハードプロブレム」を問題であるとは意識できないはずです。
動画で言及されているアプローチでは、「ソフトウェアこそが主観的体験や現象的意識やクオリア、それを感受・観測・体験する主体そのものである。そのうえ意識に関わる法則は、ソフトウェア上の状態変化ですべて説明可能であるので、何も追加する必要はない」となってしまい、なにも頭を抱えるような問題を感じないはずだからです。これは「意識のハードプロブレム」の悩みと無縁の立場です。
前にも投稿させていただきましたが、この立場より「意識のハードプロブレムを解決した」と主張する場合、立場と主張が矛盾することとなります。
以上が、「意識のハードプロブレム」を解決していない理由となります。
<イージープロブレムについて>
動画では映画というコンテンツにおける物理現象的側面と、その感受内容について触れておりますね。
この比喩は「意識のハードプロブレムとは、主観的体験は還元的に解明できないという問題である」という導入として、研究対象の錯誤がわかりやすく表現されていると思います。厳密にいうのであれば、「レセプターが化学的または電気的信号を受容するという物理的な側面と、主観的な観測体験の乖離」という本来的な錯誤とは少し本質的に異なりますが、「物理領域とクオリアの乖離」は「統語論と意味論の乖離」などとも近い関係性を持つものですので、導入としては十分にニュアンスを捉えることが可能な作りになっていると思います。
ただ、一点、懸念がございます。
「ハードプロブレム」につきましては、これまで詳しくご説明差し上げましたので、お分かりになっていただけると思いますが、決して「内的現象を扱う問題がハードプロブレムだ」ということではありません。「映写機や光の波長を扱う問題がイージープロブレムで、少女や宇宙人など感受内容を扱う問題がハードプロブレムだ」と勘違いされないよう注意する必要があるように感じました。
たとえば「心理学」や「料理」など、内的現象のコントロールを目的とした分野は古くからすでにたくさんありますが、「意識のハードプロブレム」は「心理学というものは難しいものだ」というような意味ではありません。(あたりまえですが、心理学が簡単な学問だという意味でもありません)
あくまで「物理理論に還元できない問題」を総称して、「ハードプロブレム」と呼んでいます。
動画の作りとしては、少し勘違いされてしまう恐れがあるように感じました。
以上、私見になりますが、動画を拝見して感じたことになります。
他にもなにか疑問がございましたら、できるだけ回答させていただきたく思いますので、ご遠慮なくお申し付けください。
ご参考になればと思います。
梅津様
お返事、ありがとうございます。
長いコメントをいただいたのですが、ようするに、どうなれば、意識のハードプロブレムが解決したといえるのかが書いておりません。
それが明確でないと、おそらく、何を言おうが、梅津さんは、いろいろ理屈をつけて反論してくると思いますが、いかがでしょう?
どうなれば、梅津さんは意識のハードプロブレムが解決したと言えるのでしょう?
できるだけ簡潔にお答えください。
ご返信ありがとうございます。
申し訳ございません。解決方法に関する解説が不十分であったこと、謝罪いたします。
>ようするに、どうなれば、意識のハードプロブレムが解決したといえるのかが書いておりません。
>どうなれば、梅津さんは意識のハードプロブレムが解決したと言えるのでしょう?
前述の論文内において解決を示している箇所がございますので、該当箇所を引用させていただきます。
(私にとっての解決も同様です。論文において問題提起と共に提示されている解決がございますので、私見を挟む余地はございません)
chap.6 Nonreductive Explanation
”I suggest that a theory of consciousness should take experience as fundamental.We know that a theory of consciousness requires the addition of something fundamental to our ontology, as everything in physical theory is compatible with the absence of consciousness.We might add some entirely new nonphysical feature, from which experience can be derived, but it is hard to see what such a feature would be like. More likely, we will take experience itself as a fundamental feature of the world, alongside mass, charge, and space-time. If we take experience as fundamental, then we can go about the business of constructing a theory of experience.”
解決と言うことにフォーカスすると「質量、電荷、時空などと並ぶ、宇宙を構成する基本的な要素のひとつとして『経験そのもの』を物理的に扱う『意識の基本理論』を、現在の物理理論のオントロジーに追加する」ことで「意識のハードプロブレム」は解決する事ができるということになります。
少し表現が難解ですので、もう少しかみ砕いて現実的にいうのであれば「クオリアや体験そのものを定量的に扱うための数値単位や方程式や係数などを新たに導入することで現在の物理学を拡張する『意識学』という新たな学問分野が確立されることで意識のハードプロブレムは解決する」ということになります。
他にも、解説が不十分な箇所など、難解な点などございましたら、
できるだけ回答させていただきたく思いますので、ご遠慮なくお申し付けください。
ご参考になればと思います。
梅津様
さっそくの回答、ありがとうございます。
この解答では、なぜ、意識の仮想世界仮説が否定されるのか理解できません。
意識の仮想世界仮説は、ソフトウェアとして意識の世界を構築するもので、物理学を拡張しております。
クオリアはオブジェクトとして扱い、体験そのものを定量的に扱うための数値単位や方程式や係数なども導入しております。
「意識の仮想世界仮説」のどこが、意識のハードプロブレムを解決していないというのでしょうか?
ご返信ありがとうございます。
・還元を用いている
という点において、「意識の仮想世界仮説」は「意識のハードプロブレム」を解決していません。
また、
・意識モデルを作ろうとしている
という点において、「意識の仮想世界仮説」は「意識のハードプロブレム」とは根本的に無関係です。
ここまででご理解いただけるのであれば、以下の解説をお読みいただく必要はございません。
もし、上記の内容をご理解いただけない場合、できるだけ丁寧に解説いたしますので、以下をお読みください。
(そして、腑に落ちない点などが残るようであれば、ご遠慮なくお尋ねください)
<・還元を用いている>
>ソフトウェアとして
>オブジェクトとして
以前に書き込ませていただいたことの繰り返しになってしまいますが、
論文内においては
「既存の法則に還元できるものをイージープロブレム、
既存の法則に還元できないものをハードプロブレム」
としています。
ですので、意識のハードプロブレムを解決するためには
「ソフトウェアとして」、「オブジェクトとして」
というような既存の法則に還元することなく、
クオリアや現象的意識そのものを宇宙の基本的な要素とした統一的な理論が構築される必要があります。
ここでいう「基本的な要素」とは、
時間や質量などと同様、「これ以上掘り下げて考えることが出来ない物事の基本となる要素」です。
アルゴリズムや論理など、既存の法則に還元できてしまうのであれば、
既存の基本的要素を用いて説明できてしまうもののはずですので、
新たな基本的要素が追加される必要などございません。
既存の基本的要素を用いて説明されるべきです。
(これを還元主義と呼びます。オッカムの剃刀もこのような意味です)
「既存の法則では説明できない概念(クオリアや現象的意識)があるために、
やむなく新たな基本的要素が追加される必要がある」という論文での主張ですので、
アルゴリズムや論理など既存の法則を用いて定義できてしまうのもは、「基本的要素」ではありません。
アルゴリズムや論理など、既存の法則に還元することで意識に関する何かが解明された場合、
「ハードプロブレムを解決しないまま、意識に関する何かを解明した」ことにはなるかもしれませんが、
これによってハードプロブレムが解決されることはあり得ません。
なお、
「現時点で存在が客観的に証明されていないクオリアや現象的意識を
『物事の基本となる性質』として扱うということは、具体的にどういうことなのか」
想像すらつかない、まったくイメージすらできない、とお感じになったのであれば、
「意識のハードプロブレム」の『ハード』さを感じ取っていただけているということになります。
また、我々の持つクオリアや現象的意識もアルゴリズムや論理などに還元できてしまうという立場
(機能主義や行動主義の立場)からは、「新しい基本的な要素」など必要ないということになりますので、
「最初から意識のハードプロブレムなど存在しない」、
「意識のハードプロブレムは依然として解決されていないが、
意識についてはもうすでに科学的にほぼ解明されている」
というような主張となるはずです。
<・意識モデルを作ろうとしている>
「機能主義」という立場がございます。
この「機能主義」とは
「機能的に全く同一であれば、有機生命体とPCのように、
物理プロセスが異なっていても、全く同一の現象的意識やクオリアを持つ」
と主張する立場です。
「意識の仮想世界仮説」は
・仮想世界そのものを『内部からの再認識結果』として包含的に再構築することで自己客観視を可能とし、
自己境界線を明確化する。
・物理領域、人倫領域、権利領域等の各価値世界を、相互的かつ有機的連携を伴うクラス構造として
多次元座標系に展開し、そこへ自己を投影することで自己へ収束する観測世界を仮想世界として定義する。
・情報の取り出しは、各価値世界と自己に関する因果をカプセル化したメソッドとして定義する。
・何も参考にせず無から意識を物理的に生成するのではなく、我々の意識を機能面から擬似的に模倣することで、
我々の機能と同様の機能を持つ意識モデルを再構築する。
などの方向性で、内面世界を周辺世界ごと自己と環境を相互依存の形でモデリングする手法と理解していますが、
この立場から「これによって発生した意識は我々の意識と完全に同一である」と主張する場合、機能主義となります。
(もし、意識の仮想世界仮説や、その方向性の理解に大きな認識齟齬がございましたら、この場にて簡潔にご指摘いただければと思います)
この手法は意識モデル構築を目的としたものの中でも特にシンプルで矛盾のない構造であり、
統一的な整合性を得るうえで無理のない構造であると感じましたが、
「新しく意識モデルを作ろう」という「何らかの生命体の既存の意識を疑似的に模倣する」試みである以上、
意識のハードプロブレムとは完全に無関係です。
「田方さまや梅津のクオリアや現象的意識は、脳内の物理的な状態から一体どのように発生しているのか」
に対して科学的に向き合う際に障害となるのが「意識のハードプロブレム」ですので、
「新しく意識モデルを作ろう」という際に「意識のハードプロブレム」は何の障害にもなりません。
(もちろん、直接我らや装置等のクオリアを測定できれば意識モデル構築にも便利であろうとは思いますが、意識モデル構築に必須ではありません。)
たとえばの話ですが、人工的に構築されたゲームの世界において、ゲーム内における
さまざまな価値世界とNPCの因果をメソッドとしてカプセル化した場合におけるNPCのパラメータ群は
「そのゲーム世界におけるNPCの持つ内的側面や現象的意識」として定義できるかもしれません。
ただし、この方向性での定義をどれほど精緻に行ったとしても、田方さまや梅津の持つ現象的意識とは
無関係(正しくは、無関係であるかすら不明)です。
ところが、装置内におけるクオリアや意識的体験を既存のスカラーやベクトルとして直接判定する方法が確立され、
さらに、NPCを測定して得られたクオリアと田方さまや梅津を測定して得られたクオリアが、
たまたま客観的に等価であることが認められ、いかなる場合においてもこの相関性が保たれる場合、
原理不明ながら「意識の問題も既存の物理学に還元できた」
「意識の問題を解明するために既存の物理学のオントロジーを拡張する必要などなかった」
という主張も可能となります。
この場合、「意識のハードプロブレムなど解決しなくとも、意識の謎を解明することができた」という主張となります。
ご参考になればと思います。
梅津様
回答ありがとうございます。
の意味が分かりません。
既存の法則ではない、全く、新しい法則を作り出さないといけないことですよね。
もし、そのような法則を提示したとして、それを、梅津さんに説明できたとすれば、それは、既存の法則を使ったことになりますよね。
梅津さんを納得させるには、誰にも理解できない法則を提示しないといけませんが、それを提示したとして、梅津さんには、それが正しいのか間違ってるのか判断できないですよね。
おそらく、僕の解釈が間違ってると思うので、この点を、分かりやすく説明していただけないでしょうか?
どういうものが提示されれば、それは、既存の法則に還元されないものとなるのか、具体例を挙げて、詳しく説明お願いいたします。
ご返信ありがとうございます。
私としては、ほとんどご理解いただけているように感じていますが、いかがでしょうか。
2点、お答えします。
>既存の法則ではない、全く、新しい法則を作り出さないといけないことですよね。
>もし、そのような法則を提示したとして、それを、梅津さんに説明できたとすれば、
>それは、既存の法則を使ったことになりますよね。
>梅津さんを納得させるには、誰にも理解できない法則を提示しないといけませんが、
>それを提示したとして、梅津さんには、それが正しいのか間違ってるのか判断できない
正しくその通りです。
意識に関する新しい法則に関してのことであれば、ごもっともです。
ただし、「既存の法則ではない、全く、新しい法則」だからといって、
必ず「説明できたとすれば、それは、既存の法則を使ったことになります」とはなりませんので、ご注意ください。
たとえば、論文の中で挙げられている電磁気を例えに引きますと、
電磁気についてマクスウェルは(力学など既存の物理学に還元していない)まったく新しい法則を一揃い提示する際に、
その裏付けとして、同時に実験方法と実験結果を提示しています。
この実験は、マクスウェルの提示した条件を用意しさえすれば、どこの研究所でも同じ結果を得ることが出来ますので、
マクスウェルが唐突に提示した「電荷」や「電磁力」というものの存在や、それらの要素が
マクスウェルの妄想などではなく、法則通りに現実に実在するということが、実験を通して誰もが確認できるようになっています。
つまり、「条件が完全に一致すれば完全に再現される」という結果観測が客観的(科学的)に行えますので、
観測結果を他人と簡単に共有することで法則が妥当であるかを検証可能です。
田方さまがマクスウェル同様、電磁気の法則を編み出したのであれば、
(それが、これまでの物理法則で説明できないものの存在を唐突に法則化した『電磁気学』であっても)
実験と実験結果を提示することで梅津に説明可能となります。
ところが、「現象的意識」や「クオリア」を扱う場合は、こうはいきません。
現時点では自分が体験しているものしか本質的には理解することしかできないもので、
しかも、その理解も直感的なものにすぎませんので、現象的意識やクオリアは客観的に存在が証明できていません。
「貴方の指す現象的意識と私の指す現象的意識が質的に同一のものであるか」など、誰にもわからないものです。
この「実証を再体験してもらうことができない」現状において還元主義を用いると「論のための論を構築する」羽目に
陥り、結果的には
「そのような法則を提示したとして、それを、梅津さんに説明できたとすれば、それは、既存の法則を使ったことになります」
「梅津さんを納得させるには、誰にも理解できない法則を提示しないといけませんが、
それを提示したとして、梅津さんには、それが正しいのか間違ってるのか判断できない」
というハードな問題に直面します。
田方さまが感じておられる困難は、「ハードプロブレムがハードな理由」の一つとなります。
>どういうものが提示されれば、それは、既存の法則に還元されないものとなるのか、具体例を挙げて、
意識について「既存の法則に還元されない」解決案というものの具体例を挙げることは、現在だれもできていないと思います。
私も、「既存の法則に還元されない解決案」が、いったいどんな形として存在しうるのか、イメージすらできていません。
よく言われるのは、「クオリアの測定方法を添えたうえで、一揃いの完結した理論を構築する」ですが、
どのみち「クオリアの測定方法」がどのようなものなのか、「クオリアは測定できるようなものなのか」すら私には想像できません。
こちらも、「ハードプロブレムがハードな理由」の一つとなります。
各論的な回答になってしまいましたが、
何かございましたらご遠慮なくお申し出ください。
ご参考になればと思います。
梅津様
回答ありがとうございます。
これがわからないところです。
ソフトウェアは、既存の法則ということですよね。
電磁気の法則も、それまでに存在した電気の法則を拡張した物になると思いますが、何が違うのでしょう?
梅津さんがいう、既存の法則と新しい法則の差がよくわかりません。
量子力学は、新しい法則になりますか?
相対性理論は、新しい法則になりますか?
DNAのらせん構造は、新しい法則になりますか?
これがはっきりしないと、何を提示すればいいのかわからないので、どんな場合が新しい法則で、どんな場合が新しい法則にならないのか、具体例を挙げて説明していただけないでしょうか?
ご返信ありがとうございます。
>梅津さんがいう、既存の法則と新しい法則の差がよくわかりません。
>量子力学は、新しい法則になりますか?
>相対性理論は、新しい法則になりますか?
>DNAのらせん構造は、新しい法則になりますか?
申し訳ございません。例に挙げられたものについて詳しくないため、正確な判断はできません。
<概念の追加が不要、既存の物理法則に還元可能>
温度や質量や空間や時間や長さなど、既存の概念の関係性のみで解説できてしまう現象については、
その説明に新たな基本的要素の追加が必要ありません。
<概念の追加が必要、非還元>
論文で引かれている例である「電磁力」や「電荷」は、それまでの物理学で言及されていなかった要素であるため、
そのはたらきを既存の物理学(力学)へ還元することが出来ません。
「温度や質量や空間や時間や長さ」などと同様、これ以上掘り下げて考えることが出来ない「基本的な要素」として
「電磁力」や「電荷」を物理学に追加したものです。
温度や質量や空間や時間や長さなど、既存の概念の関係性のみで「電磁力」や「電荷」を定義できるのであれば、還元できることとなります。
注意が必要なのは、
「非還元であり、我々の感じている意識を基本的な要素として扱っていさえすれば、ハードプロブレムは解決できる」
という意味ではありません。
「ハードプロブレムを解決するためには、還元では難しい。
非還元であり、我々の感じている感覚質を基本的な要素として扱っている必要があるのではないか」
という論者の主張となっています。
ご存じであると思いますが、例えば、かの有名なIITなどは非還元であり、
さらに我々の感じている意識を基本的な要素として扱っているものですが、
だからといって「意識のハードプロブレム」を解決するものではありません。
(「意識の境界問題」など、一部のハードプロブレムを除き)
IIT Version3.0 (2014)
https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4014402/
ご参考になればと思います。
梅津様
回答、ありがとうございます。
まだ、よくわかりません。
意識のハードプロブレムで、既存の物理学に還元できないというのは、脳を原子や電子まで分解しても、意識に行きあたらないということですよね。
以前、梅津さんは、ソフトウェアで意識を実現しても、それは、既存の法則に還元できるからダメだとおっしゃってましたが、これとの違いが理解できません。
ソフトウェアで動くアルゴリズムは、どれだけ分解しても、電子や原子に還元できないと思いますが、違いますか?
ご返信、ありがとうございます。
>意識のハードプロブレムで、既存の物理学に還元できないというのは、
>脳を原子や電子まで分解しても、意識に行きあたらないということですよね。
>以前、梅津さんは、ソフトウェアで意識を実現しても、
>それは、既存の法則に還元できるからダメだとおっしゃってましたが、これとの違いが理解できません。
違いはございません。
どちらも論者の提示した方法からは外れています。
(もし、ご質問の意味を取り違えているようでしたら、ご指摘ください)
>ソフトウェアで動くアルゴリズムは、どれだけ分解しても、電子や原子に還元できないと思いますが、違いますか?
ここには認識齟齬があるかもしれません。
もし田方さまが、(心身二元論的のような意味で)過度に抽象化され意味論へ傾倒した哲学的立場をとる場合、
物理的領域に依存せず、物理的領域の状態とは無関係にソフトウェアが存在することが可能であり、
「ソフトウェアは物理領域で実行されなくとも、気持ちのなかや心のなかなどに存在するのみで影響を行使することが出来る」
という種類の主張も理解できます。
しかしながら、この主張では物理領域と現象的意識に相関性を認めない立場であるはずですので、
「意識は物質とは無関係に存在する」という立場になり「意識のハードプロブレム」を扱うことが出来ません。
(もし、このような立場でいらっしゃるのであれば、そもそも意識のハードプロブレムなど存在しないはずであると思います)
>ソフトウェアで意識を実現しても、それは、既存の法則に還元できるからダメだ
につきましては、ご指摘のとおり、私の発言
>アルゴリズムや論理など、既存の法則に還元できてしまうのであれば、
>既存の基本的要素を用いて説明できてしまうもののはずですので、
に舌足らずな点がございますので、補足いたします。
ご発言のとおり、アルゴリズムや論理そのものは物理的な実体を持ちませんし、
「ソフトウェア」という抽象化された論理そのものは物理的なものではありません。
しかしながら「意識のハードプロブレム」を問題視する以上、
「実行されるためには必ず実行装置としてのインスタンスが必要となる」という立場をとっているはずです。
そのため、ここの解説
(アルゴリズムが影響を行使するためには物理的な何かに記述されたり、
何か物理的な装置にインストールされたり、とにかく何か物理的な裏付けが必要なはずだ、という点)
を省略してしまいました。
ソフトウェアは高度に抽象化されていますが、このソフトウェアの実行環境を支える物理領域におけるプロセスにおいては、
既存の物理理論(計算機であれば電子や電荷など)に完全に支配された動きをとるものと考えています。
もし、ソフトウェアの実行環境において、既存の物理法則へ還元できない動作を想定しているのであれば、
ソフトウェアに言及する前に、先んじて、その「何か」について証明する必要があるものと考えます。
ご参考になればと思います。
梅津様
回答、ありがとうございます。
いつも、回答を読みながら思うのですが、梅津さんの文章は、何を言ってるのかわかりにくですねぇ。
もう少し、端的に分かりやすく説明していただければ、もう少し論点が整理できると思うのですが。
論点の整理に協力していただければと思います。
1.まず、確認したいのは、梅津さんは、脳に意識が発生することは認めますか?
Yes/Noでお答えください。
2.1がYesであるなら、意識は、物質としての脳に還元できると思いますか?
Yes/Noでお答えください。
3.コンピュータのアルゴリズムは、物質としてのコンピュータに還元できると思いますか?
Yes/Noでお答えください。
ご返信ありがとうございます。
さっそく、お尋ねの件にお答えしようと思ったのですが、
2つのご質問に理解できない点がございましたので、
その点に関しましては、お教えください。
>1.まず、確認したいのは、梅津さんは、脳に意識が発生することは認めますか?
>Yes/Noでお答えください。
脳を構成する物質だけでなく、脳を流れる電気や波動などのエネルギーも含んで「脳」と解釈し、
「脳内における何らかの物理的プロセスが原因となって生まれている」という意味であれば、Yesです。
>2.1がYesであるなら、意識は、物質としての脳に還元できると思いますか?
>Yes/Noでお答えください。
申し訳ございません。
「物質としての脳に還元できる」のイメージがつかめず、
どのようなことをお聞きになっているのか読み取れませんでした。
「意識が物質としての脳に還元できている状態」とは、
どのような状態を指しているのかお教えいただければ、
その状態を「あり得る」と考えられるか否かについて、お答えできると思います。
>3.コンピュータのアルゴリズムは、物質としてのコンピュータに還元できると思いますか?
>Yes/Noでお答えください。
申し訳ございません。
「物質としてのコンピュータに還元できる」のイメージがつかめず、
どのようなことをお聞きになっているのか読み取れませんでした。
「コンピュータのアルゴリズムが物質としてのコンピュータに還元できている状態」とは、
どのような状態を指しているのかお教えいただければ、
その状態を「あり得る」と考えられるか否かについて、お答えできると思います。
どうぞ、よろしくお願いいたします。
梅津様
回答、ありがとうございます。
なかなか、話が噛み合わない原因は、やはり、梅津さんの読みにくい文章にあります。
おそらく、厳密に書こうとしてるため、何が言いたいのか分からない文章になっていると思われます。
そういう方はよく見かけます。
厳密さは後でいいので、まずは、分かりやすい文章を書くようにしてください。
何が言いたいのか理解できないと、話が進みませんので。
そこで、意識のハードプロブレムについて、出来るだけ分かりやすく説明してください。
中学生でも分かるように、具体的な例を挙げて、噛み砕いて説明してください。
急ぎませんので、何度も読み直して、誰が読んでも、一度読めば意味が取れる文章で書いてください。
読み直さないと意味が取れない文章は不可です。
今の梅津さんに必要なのは、分かりやすく説明する文章力です。
それができてから、中身の議論を始めましょう。
がんばってください。
バトル楽しんで見てますw
お二人の邪魔しないようにしてたんですけど、さすがに変な話になってるんで一言言わせてください
ぶっちゃけはたから読んでると梅津さんの話のほうがめちゃくちゃわかりやすいですよ、、、
たぶん田方さんがわからないのってカッカしてたり飛ばして読んでるからじゃないですかね、、、
これカッカせずちゃんと冷静になって読めば中学生でも書いてある意味は絶対分かりますって
還元とかオントロジーとかきき慣れない単語はまああったけどwべつに調べりゃいいしw
とにかく俺は梅津さんのイチから書いてある最初のやつで意識のハードプロブレムが何かは100%わかりました
てか田方さんはカッカしすぎっていうかぶっちゃけ敵意むき出しすぎw
梅津さんは聞かれたからってんで聞かれたことにそのつど丁寧に答えてるのにその答えはまるっきり無視ってw
で、また別の部分にケチつけたり質問したりできるとこ見つけて逃げ続けてるような、、、
なんかもう頑なすぎてけっこう痛々しい感じに仕上がっちゃってますよまじめに、、、
で、まあ梅津さんも梅津さんなんですよねーww
本題と関係ない言いがかりみたいなのにも毎回丁寧に淡々とわかりやすく答え続けてw
本題からズラされてるのにまったく無抵抗で質問に完全に誘導されちゃってて、、、
ほんとナイスキャラありがとうございますwwwwww
脱線したけど言いたかったのは、、、
理解するためなんだから読み返さなくてもわかる縛りとかぜんぜんいらないですよね?ってことです
てか、むしろ田方さんのほうが何度読んでも何言ってんのかわからないのとか結構多いですね
意識を物質としての脳に還元するとか何度読んでも何言いたいのかほんとにさっぱりわかりません、、、、
具体的な電磁の例があるのにそれ以上具体的ってのも例えばどういうのを求めてるのか全然わからないし
プログラムが還元してる意味がわからないってのもプログラムが還元以外に何があるって言いたいのかわからないし
還元使わない意識を一番基本にした理論が具体的にどんなものになるかって、、、
いやいや、それが難しいってみんな言ってるんだから解決したって言い張ってる人が説明すりゃいいでしょ、、、
てな感じでイチ観客は見てましたw
ウロボロ酢様
コメント、ありがとうございます。
それでは、ウロボロ酢さんにも、同じ宿題を出しますね。
意識のハードプロブレムについて、中学生でもわかるように、説明してください^^
もちろん、調べたらわかるとかなしですよ^^;
ご返信ありがとうございます。
>論点の整理に協力していただければと思います。
と、ご自分で言いだして私を巻き込んだ挙句、すでに部分的には回答させているわけですから、
新たな要求を出す前に、まず、この「論点の整理」に関するやりとりを完了させてください。
>中学生でも分かるように、具体的な例を挙げて、噛み砕いて説明してください。
>急ぎませんので、何度も読み直して、誰が読んでも、一度読めば意味が取れる文章で書いてください。
>読み直さないと意味が取れない文章は不可です。
とのことですので、まずは田方さまご自身が
>2.1がYesであるなら、意識は、物質としての脳に還元できると思いますか?
>3.コンピュータのアルゴリズムは、物質としてのコンピュータに還元できると思いますか?
という分かりづらい文章について、誰が読んでも一度読めば意味が取れるよう、
具体的な例を挙げて、噛み砕いてご説明いただくようお願いいたします。
梅津様
お返事、ありがとうございます。
今、お願いしてるのは、この件とは関係ありませんよ。
なかなか話が噛み合わないので、仕切り直しをしようと思ってるわけです。
そのためには、梅津さんが考える意識のハードプロブレムを、僕が、きちんと理解する必要があるわけです。
そこで、梅津さんに分かりやすく説明して欲しいわけです。
分かりにくい文章を書く方は、よく聞いてみると、本人自身がわかってないってことがよくありますが、
梅津さんは、そうではないと信じております。
がんばってください。
梅津さんなら、きっと、できますから!
ご返信ありがとうございます。
お昼の席で、こちらのページにおけるやり取りをチーム内共有したところ、
何名かの方から「そういうニーズがあるならやってみたらどうか」という流れになり、
「実際に意識のハードプロブレムが何なのか、どこが難しいのかを中学生でも理解できるように
丁寧にわかりやすく解説するページもしくは動画を作成してみよう」
という機運が高まっているところです。(まだ確定ではございません)
本当に所内で作成することになるのか、作成したところで一般公開という形になるかどうかなど、
まだその多くは未定ですが、もしWEBで公開されるようなことになった場合は、
こちらにURL等ご報告させていただきますので、それをもって回答とさせていただければと思います。
先の話ですが、理解できていなかった箇所が明確になりましたら、お教えいただけると幸いです。
(こちらでのやりとりを作成動機として紹介させていただくことになるかもしれません。その際はよろしくお願いします)
ぜひ、お待ちいただければと思います。
それでは、失礼いたします。
梅津様
さっそくのお返事、ありがとうございます。
それは、ありがたいです。
楽しみにしております。
ところで、突然、所内と出てきたのですが、どこかの研究所でしょうか?
どこに所属か教えていただけないでしょうか?
こっそりメールで教えていただいても構いませんよ。
一般公開するときは、こちらをリンクしていただくのは構いませんので。
どうぞよろしくお願いいたします。
梅津様
「意識のハードプロブレム」を中学生でも分かるように解説するページもしくは動画はできたでしょうか?
前回のコメントから2ヶ月以上経ちますが、まだ、回答がないところを見ると、できなかったということでしょうか?
梅津さんのことですから、中学生でもわかるように真剣に考えたのだと思います。
それでもできないということは、おそらく、「意識のハードプロブレム」の本質を理解してなかったといことに気が付いたのかもしれませんね。
難しい言葉を使って、お互い、分かったような会話をしているだけで、だれも、本質は分かってないということは、頭のいい学者さんが良くやってることですので、梅津さんだけじゃないですので、安心してください。
その証拠に、同じ課題を出したウロボロ酢さんも、一切、返答がありませんので。
それは、僕も同じじゃないかと言われても困るので、僕なりに、あの後、「意識のハードプロブレム」を中学生でも分かるような動画を撮りましたので、参考に見てください。
「意識の仮想世界仮説 とことん解説 意識のハードプロブレム編」
この話は、続きもありますので、よかったら、こちらもご覧ください。
「現代科学が意識を扱えないたった一つの理由」
さらに興味あがりましたら、電子書籍も出しましたので、よかったら、こちらもご覧ください。
「普通に会話ができる ドラえもんの心のつくり方1 コンピュータに意識が発生するまで」
どれも、中学生でも分かるように易しい言葉で書いてますけど、本質は外さないようにしているつもりです。
ご意見、ご感想などありましたら、コメントいただけたらと思います。
どうぞよろしくお願いいたします。
田方さんめちゃくちゃ逃げてますねw
側から見たら明らかに梅津さんの方が詳しいしわかりやすく論理的に説明できてるのにそれがわからないって田方さんの理解力が欠けてるからだと思うんですが。。
しかもそれを「梅津さんがわかりにくい文章を書くからだ!」って
小学生でもそんな反論書きませんよwww
まさこり様
待ってました!
これを待ってたんです!
それじゃ、さっそく、お願いしますね。
まさこりさん、僕の理論のどこが間違ってるのか論理的に説明してください。
逃げないでね^^
私は梅津さんの方が分かりやすいと言ったまでなんですが…
論点ずらしとかひろゆきかよw
あなたの理論が完全に論破されてるのはあなたと梅津さんの会話を見たら自明なのでご自分で確認していただければと
それと、頭に血が上っちゃって
逃げないでね^^
とか言っちゃってるような人の理論なんてハナから信用できませんよwwwwwww
まさくり様、お返事ありがとうございます。
自明なことを、自分の言葉では説明できないという理解でよろしいでしょうか?
もし、説明できるのでしたら、ぜひ、説明いただければと思います。
これは、論点をずらしてるのではなく、新たなお願いとして申し上げております。
ご検討の程、どうぞよろしくお願いいたします。
奇跡のようなページです。
意識のハードプロブレムがこれほど初心者にもわかりやすく平易な日本語で説明されているページはほかにありません。
ただ読み込むだけで意識のハードプロブレムの何がハードなのか確実に理解できるようになっている驚くべきページです。
梅津氏がどなたかは存じ上げませんが氏の説明は意識のハードプロブレムや心体問題を学ぼうとする際まず最初に読むべき文章といえます。
誤解されやすい意識のハードプロブレムを基礎知識がまったくない方にもわかりやすく丁寧でありながらも簡潔に解説されています。
また少し興味があるだけと言っている沼針氏の理解度と的確な例えを引いて表現する能力と問題を整理する力にも驚くべきものがあると思います。
はじめて意識のハードプロブレムに頭を悩ませたときのみずみずしい感覚や興奮が文章の至るところにほとばしっていて多くの人の理解を助けるのではないでしょうか。
またカメオ出演も豪華豪華。豪華という言葉では片づけられないほど。
のちにChatGPTのメインコミッターとなる若き飞杨氏?はては川人光男先生?
いろいろな人がいろいろな角度で手を変え品を変え難しさが語れらるために分かっているつもりのことでも新たな発見があります。
とくに専門ではない人に意識のハードプロブレムが何なのかを説明するときに使える優れた表現がこれでもかというほど満載されていて実際非常に役立ちます。
ありがとうございます。
MsTn様
コメント、ありがとうございます。
久しぶりに、自分でもこちらのページを読んでみました。
たしかに、梅津さんとのバトル、面白かったですね。
どんどん、激しくなってきて、何を言いたいのかよくわからなくなったので、「中学生でもわかるように説明してください」といえば、「わかりました。わかりやすい動画を作成して一般公開します!」との梅津さんの言葉を最後に、本人からのレスがなくなりました。
まさに、ハードプロブレムですね。
結局、梅津さんが作成しないので、僕が、中学生でもわかる動画を作成しましたが。
それがこの動画です。
114.【もう、分からないとは言わせない!】意識のハードプロブレムをどうやって解決したか
ただ、せっかく作ったのに、誰も、反応してくれないんですよねぇ。
ところで、MsTnさんは、この動画みて、解決したと思われましたか?
これまで多くの方の簡潔で分かりやすい優れた解説が並ぶなかわたしの説明などに価値があるか疑問ですが僭越ながらわたしもここに名を連ねさせていただき少しだけ角度を変えて具体的にお示しします。
張ってある動画は≪意識のハードプロブレム≫の存在を否定している形になってるのでわたしは先人たちとは少し趣向を変えてこの動画をどう変えれば≪意識のハードプロブレム≫の解説動画になれるかお示しします。
改善点1:
動画内にある
>「霊」「魂」など科学で解明できないものを取り入れる必要はない
>符号化されたデータを処理するのが「意識」
という感じの発言は全部消して≪意識のハードプロブレム≫を解決することがなぜ必要なのかということを重点的に説明してください。
解説1:
これは動画の中で一番違和感ある部分でしたしコメント欄でも何人かツッコんでますが立場と主張が矛盾しているというやつです。
動画内のこういう主張は同一説や物理主義といった考え方で一元論と呼ばれるものです。
これだと
・≪物理的プロセスそのものが意識でありそれ以上何も説明する必要はない≫
・≪物理領域外に主観的な意識体験が発生してることについては認めるが科学的に証明する必要などない≫
・≪物理領域外のことを科学的に証明することは人間には不可能だから考えるだけ無意味≫
みたいな立場で≪意識に関してはイージープロブレムしか存在しない≫ことになります。
≪意識のハードプロブレム≫をわかりやすく解説することが目的の動画なのに≪意識のハードプロブレム≫が存在しない話の流れになってしまっています。
修正方法1:
じゃあ具体的にどう書けばいいかをお示しします。
①意識の問題を『科学的に』扱うには≪物理領域外に発生してる主観的な意識体験やクオリアというオカルトみたいな現象の性質≫を定量的・定性的に検証する必要がある。
②哲学なら思考実験や論理で証明してハイ終わりでいいが科学的に扱うとなると≪同一条件において同一の実験を行えば誰がいつやっても同一の結果が得られる≫という再現性担保のための実証実験が必要となる。
③実証実験には観測が不可欠だけど現象意識やクオリアは物理領域外に展開されるから既存の物理的な手段で観測することができない。
④そもそも≪既存の物理的な手段で観測できない現象意識やクオリアの存在を客観的に検証する/科学的に観測する≫とは『一体どういうことなのか』『どういう記述をすれば因果関係を適切に表せたことになるのか』『物理領域外の現象をどうやって観測すればいいか』わからないことだらけである。
⑤だから90年代まで脳神経学者たちは意識の≪物理的な手段で観測できない霊的な現象の部分≫について科学的に扱うことを避けて比較的簡単なわかりやすい物理領域でのインプット/アウトプットに着目した機能的な部分ばかり研究してきたが、その状態で「もう意識はほとんど解明していて大きな問題は残されていない」と豪語した。
⑥それを94年チャーマーズが『脳神経学者たちがやってる意識の研究は既存の物理的な手段で観測できるイージーブロブレムばかりで、既存の物理的な手段で観測できない(既存の物理学に還元できない)ハードプロブレムには誰も触れてない』ことを①~⑤の経緯をまじえて批判した。
という流れできちんと問題解決の必要性を感情移入できるように説明してあげてください。
動画の最後に以下のような結論を用意してください。
まとめ1:≪意識のハードプロブレムは既存の物理的な手段で観測できない現象を科学的に扱うにあたって『どういう感じに因果を記述すればいいかわからない』『どういう方法で物理領域外の現象意識を観測すれば客観的に存在を証明できたことになるのかわからない』という問題です≫
まとめ2:≪逆に意識のハードプロブレムが解決した状態とはどういう状態かというと『エネルギーや時間や空間を軸とした物質の動きと物理領域外に展開されるクオリアや現象意識の質や量との関係性を、原因と結果という因果関係で記述するとは一体どういうことなのか(=どうしたら記述できたと言えるのか)判明した』と『物理領域外に現象意識やクオリアが発生していることを客観的に観測するとはどういうことなのか(=どうしたら客観的に観測できたと言えるのか)判明した』という状態です≫
まとめ3:≪まとめ2の状態になれば他の物理的な問題(=イージープロブレム)と同じように『観測と検証を続けていけば時間とともに性質や関係性などがどんどん明らかになっていく』のでいつもの科学のやり方でいけるということになり特にハードな部分は解決したということになります≫
と動画を締めてください。
この流れだと中学生とかでもわかりやすくなるのではないかと思います。
また以上のことからこの動画が≪意識のハードプロブレム≫を解決していないことはわかると思います。
≪符号化の処理内容とそれに応じて物理領域外に発生する意識の量や質との関係性を記述する方法≫や≪符号化によって物理領域外にクオリアや意識が発生していることを客観的に観測する方法≫について話すと≪意識のハードプロブレム≫に関する動画になると思います。
MsTnさん
回答、ありがとうございます。
せっかく回答いただいたのですが、僕の質問の仕方が悪かったのか、正しく意図が伝わってなかったようです。
見ていただきたいのは、以下の動画です。
114.【もう、分からないとは言わせない!】意識のハードプロブレムをどうやって解決したか
この動画の意図は、タイトルにもありますように、「意識のハードプロブレムを解決した」という内容です。
ハードプロブレム自体を説明する動画ではございません。
質問は、この動画を見て、MsTnさんは、意識のハードプロブレムが解決したと思われましたか?
ということです。
答えやすいように、動画の趣旨も書いておきます。
意識のハードプロブレムとは、物理世界のデータを符号化することによって起こりました。
符号化されたデータがクオリアです。
符号化されたデータを認識するのが意識です。
これは、ノイマン型コンピュータで再現できます。
なので、意識のプログラムを再現すれば、意識のハードプロブレムは解決したこととなります。
さて、これで意識のハードプロブレムは解決したといえるでしょうか?
これが質問となります。
どうぞよろしくお願いいたします。
コメントありがとうございます。
その動画であってますよ。
コメント55で書いたことは『114.【もう、分からないとは言わせない!】意識のハードプロブレムをどうやって解決したか』の動画についてのものです。
>意識のハードプロブレムとは、物理世界のデータを符号化することによって起こりました。
>符号化されたデータがクオリアです。
>符号化されたデータを認識するのが意識です。
>これは、ノイマン型コンピュータで再現できます。
>なので、意識のプログラムを再現すれば、意識のハードプロブレムは解決したこととなります。
>さて、これで意識のハードプロブレムは解決したといえるでしょうか?
もう一度最初から最後まで見ました。
≪意識のハードプロブレム≫は解決できていません。
というより≪意識のハードプロブレム≫が指し示してる問題が何なのか理解できていないと思います。
まずそもそもですが上の主張は一元論なのでこの方向性で研究する限り≪意識のハードプロブレム≫(=研究に対する困難さ)は発生しません。
こういう方向性なら他の物理現象に対する課題とおなじように投入したリソースに応じて研究が進んでいくにつれいろんなことが証明されていくような感じがしますよね。
これは現象意識のオカルティックな主観的体験を客観的に証明する必要がない立場だからです。
現象意識のオカルティックな主観的体験を客観的に証明しようとしたときにはじめて≪意識のハードプロブレム≫が研究を邪魔してきます。
チャーマーズは『脳科学者は物理的に観測できる部分(=イージープロブレム)ばっかり研究していて、物理世界に現れてこない現象意識のオカルティックな主観的体験を科学的に扱うことを避けてきた』と批判し『物理側からのアプローチではなく主観的体験である現象意識やクオリアの存在を研究対象の中心に据えて意識側から科学的に研究する必要がある』と言ったのですが、それに伴う困難が≪意識のハードプロブレム≫です。
分かりやすく『114.【もう、分からないとは言わせない!】意識のハードプロブレムをどうやって解決したか』の動画内容に沿ってその困難さ書いてみます。
≪われわれの現象意識やクオリア体験はどうやら符号化に伴って物理世界の外に発生することがわかった≫とします。
そのとき
・『どうしたら物理世界で行われてる符号化処理と現象意識の質や量との関係性を因果関係として記述できたことになるのかわからない』
・『どういう観測結果を用意したら物理領域外に主観的な体験をしてる主体が存在することを客観的に証明できたことになるのかわからない』
というのが≪意識のハードプロブレム≫です。
なので、この動画で≪意識のハードプロブレム≫を解決したというためには
・符号化処理と、それに応じて物理領域外に発生する意識の量や質との2者の関係性は、『こういう感じに記述すれば因果関係が表現できる』
・符号化によって物理領域外にクオリアや意識が発生してるということは『こういう観測結果を出せば客観的に存在が証明できたと言える』
というふうな感じする必要があると思います。
詳しくはコメント55をお読みください。
こういう書き方なら中学生でも理解できるのではないかと考えて書いた結果がコメント55です。
MsTn様
さっそくの回答、ありがとうございます。
とのことですが、観測結果で客観的に存在を証明できたら、それは、イージープロブレムじゃないでしょうか?
コメント55には、
とありますが、観測結果で客観的に存在を証明するって、物理的な手段しかありえないと思いますが、違うのでしょうか?
物理的な手段以外で客観的な観測結果を出すことって、あり得るのでしょうか?
もしあれば、例を挙げていただけないでしょうか?
コメントありがとうございます。
>観測結果で客観的に存在を証明できたら、それは、イージープロブレムじゃないでしょうか?
すみません。ご質問がよくわかりませんでした。
物理的に観測することができない存在を客観的に証明しようとすると立ちはだかる困難が≪意識のハードプロブレム≫です。
物理的に観測することができないものの存在はどうやっても物理法則に還元(=物理的に証明)することができないからいままでの科学のやり方では証明が困難だという話です。
そのうえで『できるできないは置いといてこういう観測方法でこういう結果をそろえれば客観的にクオリアや現象意識が存在することを証明できたと言える』という証明方法を見つけると≪意識のハードプロブレム≫の解決です。
それがわかればその観測結果が得られる方向に努力できるのでその先は科学的なアプローチが通用しますからハードな部分を突破しています。残った部分は方向性が決まってるんだから突破した部分に比較するとイージーではありますよね。
現象意識を何らかの方法で客観的に証明できた時は≪意識の問題はイージープロブレムになた≫でも≪意識のハードプロブレムを一部解決した≫でもいいと思います。
疑問はそういう意味ではないでしょうか?
なお蛇足ですが還元できないっていうのは『こういう物理的な観測方法で物理的な証拠を集めれば客観的にクオリアや現象意識が存在することを証明できたと言える』という感じで物理的な観測結果が証拠になるという方向性でやると『その証拠が目的の現象意識を観測した結果であって別の何かの観測結果ではないということをどう証明するのか』というようなカテゴリー困難からいつまでたっても逃れられずキリがないから無理だという意味です。
>観測結果で客観的に存在を証明するって、物理的な手段しかありえないと思いますが、違うのでしょうか?
>物理的な手段以外で客観的な観測結果を出すことって、あり得るのでしょうか?
>もしあれば、例を挙げていただけないでしょうか?
その疑問に対する答えが出ているのなら何もハードではないということです。
わかりやすくまとまっているWikiから引用すると
>主観的な意識体験を外部から観測する方法が無いため、科学的方法が通用するかどうかすら分からないという意味でハードであるとされている。
という文章です。わたしの説明よりわかりやすいですかね。
繰り返しですが物理的に観測することができないものの存在はどうやっても物理法則に還元(=物理的に証明)することができません。
じゃあ物理法則に還元できないということだけは確定したとしてほかに証明する方法なんかあるんですかというとあり得るかあり得ないかすらわからないので難問と言われています。
物理的に観測することができないものの存在が物理的でない方法で証明できた例なんてデカルトのやつぐらいしか思いつきませんが、あれだって主観的に証明できただけなので客観的に証明できた例なんてひとつもないのではないでしょうか。
MsTn様、お返事ありがとうございます。
どうも、僕の言いたいことがなかなか伝わっていないようです。
分かりやすく説明するのって、難しいですね。
たとえばですよ、あるニューロンを電気刺激すると、これこれのニューロンが発火して、これがクオリアだって証明したとするでしょ。
おそらく、MsTnさんなら、それはイージープロブレムだっていいますよね。
何が言いたいかというと、客観的に観測可能にクオリアを証明した時点で、イージープロブレムとなって、ハードプロブレムにならないって、MsTnさんならいいそうだってことです。
かといって、符号化処理がハードプロブレムだと言えば、客観的に観測可能な証明ないからハードプロブレムを解決したことにならないと言われます。
結果として、何を言っても、それはハードプロブレムを解決したことにならないと言うんじゃないかと思ったわけです。
そう思ったので、具体的にどうすればハードプロブレムを解決したことになるのかって例を聞いたのですが、「あるかどうかわからないから難問だ」との答えです。
科学の考え方に、反証可能性ってありますよね。
以上のやり取りから、MsTnさんの主張する意識のハードプロブレムは、反証可能性がなさそうに思えるのですが、いかがでしょう?
コメントありがとうございます。
>たとえばですよ、あるニューロンを電気刺激すると、これこれのニューロンが発火して、これがクオリアだって証明したとするでしょ。
>おそらく、MsTnさんなら、それはイージープロブレムだっていいますよね。
>符号化処理がハードプロブレムだと言えば、客観的に観測可能な証明ないからハードプロブレムを解決したことにならないと言われます。
論点がどこにあるのかわからないので的外れかもしれませんが妙にひっかかるので念のため確認します。
大前提としてこういう一元論に立脚した研究に≪意識のハードプロブレム≫は存在しませんし理解することなどできないはずです。
主観的な現象意識やクオリア体験の存在を客観的に証明しようという気がない限りそこにある課題はどれだけ難しくても全部イージープロブレムです。
なおコメント34で【基礎/応用】というギャップが指摘されていますが、わたしはこれが本当に見事に真因を突いた鋭い指摘のような気がします。
≪意識のハードプロブレム≫は基礎で『今自分が感じてるこれを科学的に証明して分析したい』という自然科学の原始的な欲求に対して立ちふさがってくる問題です。
『意識を発生させたい』というような応用ではあまり意識する必要もなく考える意味もないどうでもいい問題です。
>客観的に観測可能にクオリアを証明した時点で、イージープロブレムとなって、ハードプロブレムにならない
>結果として、何を言っても、それはハードプロブレムを解決したことにならないと言うんじゃないかと思ったわけです。
そんなことはありません。
その証明のあと科学的なアプローチで主観的な現象意識やクオリア体験を研究できるようになったのならその証明は間違いなく≪意識のハードプロブレム≫を解決しています。そこから先は人類おなじみ科学のやりかたでOK(=イージープロブレム)になるわけです。
>意識のハードプロブレムは、反証可能性がなさそうに思えるのですが、いかがでしょう?
そのとおりだと思います。≪意識のハードプロブレム≫は科学などではないので反証可能性などありません。
そもそも≪意識のハードプロブレム≫は理論とか命題とか仮説ではないので何の主張もありません。
オカルト的なものを客観的に証明しようとするとみんなぶつかる壁のことで、わかりやすく言うと『クオリア証明の悩みあるある』みたいな悩みにすぎず科学などではありません。
≪年金問題≫がただの悩みにすぎず科学などではないのと一緒です。
ですから≪意識のハードプロブレム≫の問題設定自体が間違ってるという批判もたくさんあるわけです。
MsTn様
回答、ありがとうございます。
かなり、核心に近づいてきましたので、もう少しお付き合いください。
ここで、一番重要なのは「その証明」なので、ここを、もう少し深堀させてください。
ここで、はっきりとMsTnさんは、「意識のハードプロブレム」は科学でなく、反証可能性がないと明言されておられますよね。
つまり、「意識のハードプロブレム」を解決するある仮説が提示されたとしても、それが正しいとも、間違いとも示す方法は存在しないというわけですよね。
だから、いままで、MsTnさんが今まで述べてきたことが成り立つわけですよね。
つまり、
1.客観的に観測可能に示せば、それはイージープロブレムだからハードプロブレムを解決したことにならない。
2.客観的に観測可能でなければ、客観的に観測可能でないからハードプロブレムを解決したことにならない。
と、何を言っても、意識のハードプロブレムを解決したことにならないって理屈がなりたつわけです。
もし、そうでないなら、反証可能性を示す必要がありますが、意識のハードプロブレムは科学でないので反証可能性はないとのことです。
やはり、何を言おうと、MsTnさんが気に入らなければ、意識のハードプロブレムを解決したとならないわけですね。
まぁ、科学でない人間社会では、よくあることです。
なるほど。
MsTnさんが考える意識のハードプロブレムというのは、年金問題の悩みみたいなものなんですね。
MsTnさんが考えがよくわかりました。
ありがとうございました。
コメントありがとうございます。
>「意識のハードプロブレム」を解決するある仮説が提示されたとしても、それが正しいとも、間違いとも示す方法は存在しないというわけですよね。
反証可能性がない仮説は科学的ではないわけですが反証可能性がないからといってすべて誤りというわけではありませんよね。
『「意識のハードプロブレム」を解決するある仮説』は仮説なので正しい正しくないは別問題として反証不可能であれば仮説として科学的ではないとは判断されるべきです。
『年金問題』そのものに正解も不正解もありませんが『年金問題を解決する仮説』が反証不可能ならその仮説が正しいか正しくないかは別として科学として扱うには不備があるというのと同様です。
ちなみに≪意識のハードプロブレム≫は反証不可能であるため自由意志研究で有名なデネット教授によって疑似科学だと批判されていてチャーマーズもそのことを認めています。
>1.客観的に観測可能に示せば、それはイージープロブレムだからハードプロブレムを解決したことにならない。
解決したことになると思うのですが何故解決したことにならないのでしょうか?
それが可能かどうかはさておき『物理的に観測できない現象もこういう観測方法でこういう観測結果を出せば客観的に存在が証明できたと言える』という方法を見つけるだけで≪意識のハードプロブレム≫は解決しますよね。
そこから先は『こういう観測方法でこういう観測結果を出せばいい』という科学的なアプローチが可能になるので。
それを『物理的に観測できない現象を客観的に観測した』というのならなおさら解決してると思います。
>やはり、何を言おうと、MsTnさんが気に入らなければ、意識のハードプロブレムを解決したとならないわけですね。
わたしが書いてることは私の考えというより一般的な理解だと思います。
つまり『物理法則に還元できないものを客観的に証明するなんて可能かどうかすらわからないものにどう手を付けていい想像すらできない』という問題を解決する方法は『できるかどうかは別としてどうすれば物理法則に還元できないものを客観的に証明できたことになるのかについてだけは論理的整合が取れた』だということです。
逆にわたしから質問させてもらうと田方さん的には≪意識のハードプロブレム≫は何を達成すれば解決したと言えると考えていますか?
≪意識の仮想世界仮説≫で解決させた≪意識のハードプロブレム≫とは田方さんの定義ではどんな問題でしょうか?何が解決できたのでしょうか?
もしそこの認識に差があればわたしが理解できない原因がわかるかもしれません。
MsTn様
お返事ありがとうございます。
それでは、最初から仕切り直しましょう。
意識のハードプロブレムとは、物理世界の情報を符号化することで起こっていると考えています。
だから、物理世界からいくら探っても、符号化した情報の中身には到達しません。
そして、意識は、符号化した情報の世界にあります。
これが僕の仮説です。
これは、意識が符号化した情報の世界にあることを客観的に証明したわけではありません。
ただ、意識のハードプロブレムを構成する条件は満たしていると思います。
脳のニューロンを調べてわかることの外に、意識の本質があるという意味で。
これを直接証明することはできませんが、同じ仕組みをコンピュータで再現することは可能です。
つまり、CPUの回路が脳のニューラルネットワークとすると、その上で動くプログラムが意識が存在する世界という関係だということです。
それが正しいとしたら、プログラムで意識を作ることが可能です。
そして、プログラムで意識が作れたら、プログラムの中身は直接観察することができます。
つまり、意識を直接観察することができたと言えます。
そこから意識のハードプロブレムの解決の糸口につながるかもしれません。
意識の仮想世界仮説は、意識が情報だという前提の上でなりたつ話で、意識のハードプロブレムとは直接関係ないので、ここでは割愛させていただきます。
僕が作ろうとしてるのは、自然言語の意味理解ができる応用システムです。
意識の解明とか、意識のハードプロブレムの解決を目指してるわけではありません。
ただ、システムを開発する過程で、意識を作りだす必要があって、それができたら、意識のハードプロブレムが解明されるかもしれないということです。
出発点が皆さんとちがうのも、議論が噛み合わない原因になっていると思われます。
なお、意識のハードプロブレムと符号化の共通性については、僕だけでなく、茂木健一郎氏も、YouTubeで言及しておられました。
さて、MsTnさんは、この仮説の根本となる符号化に関してはどうお考えでしょう?
意識のハードプロブレムを構成する条件すら満たしていないとお思いでしょうか?
それとも、意識のハードプロブレムを構成する条件は満たしているが、客観的に証明されていないから正しいとは言えないということでしょうか?
コメントありがとうございます。
>そして、プログラムで意識が作れたら、プログラムの中身は直接観察することができます。
>つまり、意識を直接観察することができたと言えます。
ここで観察しようとしてる≪プログラムの中身≫が物理的に観測できないものならこれは≪自然主義的二元論≫(=現象意識は物理現象とは別の存在で物理現象にスーパーヴィーンしてる)の立場でこの研究は≪意識のハードプロブレム≫です。
逆にここで観察しようとしてる≪プログラムの中身≫が物理的に観測できるものなら≪一元論≫の立場で今まで通りの普通の科学で≪意識のハードプロブレム≫とは関係のない話です。後者にはない困難が前者にはありますよね。前者と後者の差が≪意識のハードプロブレム≫を扱っているかどうかの差で『物理法則に還元できない現象』を研究対象としてきちんと扱ってるか触れないで済ませてるかの差です。
>さて、MsTnさんは、この仮説の根本となる符号化に関してはどうお考えでしょう?
>意識のハードプロブレムを構成する条件すら満たしていないとお思いでしょうか?
>それとも、意識のハードプロブレムを構成する条件は満たしているが、客観的に証明されていないから正しいとは言えないということでしょうか?
≪意識のハードプロブレムを構成する条件≫は≪物理的に観測できない現象の存在を客観的に証明したがってるかどうか≫です。
研究の過程で≪仮説の根本となる符号化が原因となって生成された主観的な現象意識やクオリア≫など≪物理的に観測できない現象≫を客観的に証明する必要がある研究なら≪意識のハードプロブレムを構成する条件≫は達成されています。
いま一般的にハードと言われてるのは≪できるかどうかはさておき何ができたら物理的に観測できない現象を客観的に証明出来たことになるのかすらわからない≫というレベルの困難のことです。
これが解決できさえすればいいので≪物理的に観測できない現象を客観的に証明する≫ことまでは必要ないと思います。
もちろん『主観的な現象意識やクオリア』など≪物理的に観測できない現象≫を客観的に証明出来たら≪意識のハードプロブレム≫など当然解決していますが、現段階ではそこまで求められていないと思います。
≪できるかできないかは知らないがこういう証拠があれば客観的に説明できたことになるのではないか≫という証明方法を見つけるだけでいいと思います。
>出発点が皆さんとちがうのも、議論が噛み合わない原因になっていると思われます。
絶対にぶれない部分とぶれる可能性のある部分があると思います
チャーマーズは論文の中で意識の問題を≪簡単なタイプの問題≫と≪難しいタイプの問題≫に分けていますよね。
≪簡単なタイプの問題≫は今までの科学的な手法で研究を進めればいつかは解明できそうな問題のことで意識に関する研究は94年当時ほとんどこれだと批判しています。
≪難しいタイプの問題≫は今までの科学的な手法ではいつまでたっても解明できなさそうな問題のことで科学者はこれを無視してると批判しています。
≪難しいタイプの問題≫に共通するのは『物理法則に還元できない』点で難しい理由として『物理的に観測できないものを科学的に扱う方法が現時点ではわからない』という点を理由に挙げています。
ここまでは論文の中で行われてる定義なので読み違えなどの心配もなさそうですし全員が同じ認識でぶれることはないはずです。
なので議論が噛み合わない原因はこの先の『どうしたら解決したと言えるか』というようなことだと思います。
私の場合は≪難しいタイプの問題≫の≪難しさ≫が排除できれば解決だと思ってます。
蛇足ですが科学者が≪難しいタイプの問題≫を避ける理由は2つあると言っていますね。
ひとつは現時点で客観的に存在が証明されていない≪意識の物理法則に還元できない側面≫に関する研究は≪前世≫や≪死後の世界≫や≪幽霊≫の研究と同じように『科学でははない』ので真剣な研究対象になりにくい。
もうひとつは≪簡単なタイプの問題≫が意識のインプット/アウトプットに注目した機能的側面に関する研究であるため人類の役に立つ研究である反面≪難しいタイプの問題≫は解明してもほとんど何の役にも立ちそうにないということ。
MsTn様
お返事、ありがとうございます。
少しずつ議論が深まってきましたね。
引き続き、中学生でもわかるように、わかりやすい議論ができればと思います。
僕が提案するのは、CPUとプログラムの関係が、脳と意識、クオリアの関係だというものです。
ここで、CPUの中を流れる電気が2進数の信号だとか、電圧が1と0を表してるとかすら未知であるとします。そして、CPUの配線を流れる電流や電圧が物理的に観測できるものです。
すると、CPUの電流や電圧をいくら観測しても、CPUで、どのようなプログラムが実行されているか、プログラムの中身はわからないですよね。
これは脳のニューロンを物理的に観測しても、意識やクオリアを物理的に観測できないのと同じタイプの現象と言えると思いますが、ここまでは、問題ないでしょうか?
もし、そうであるなら、意識やクオリアをプログラムで再現しようとする研究は「意識のハードプロブレム」の研究と言えると思いますが、これは異論はないでしょうか?
符号化の部分を具体例を挙げて説明すると、カメラでリンゴを撮影したとします。それを画像認識して「リンゴ」と判断したとします。それを、0110とか、何らかの符号に変換したとします。
そして、符号化された0110を認識するプログラムがあるとします。ここで、符号化された0110をリンゴのクオリア、0110を認識するプログラムを意識プログラムとします。
そうすると、0110は、符号化が原因となって生成されたクオリアとなると思うのですが、ここまでは問題ないでしょうか?
僕の研究は、この意識モデルに基づいて、意識のプログラムを作ろうとしているものとなります。このことを指して、MsTnさんがいう「≪物理的に観測できない現象≫を客観的に証明する必要がある研究」となるのかどうかは分かりませんが、この場合も、「意識のハードプロブレムを構成する条件」は達成されていると思われますか?
とのことですが、プログラムの中身をCPUの電圧から読み解くのでなく、プログラムその物(意味のわかる文で書かれたプログラム)を扱うのであれば、「難しさ」が排除されると言えますよね。
この場合、意識のハードプロブレムが解決したと言ってもいいとお考えでしょうか?
最後の蛇足の部分だけ、よく意味が分からなかったので、教えていただけないでしょうか?
意識のハードプロブレムが解明されて、何らかの形、たとえばコンピュータ、または有機物で意識を生み出せたとします。
それは、人間と同じように感じたり思考して、普通に会話もできるものとなります。
もし、それができれば、あらゆる産業で役に立つと思いますが、そういうことではないのでしょうか?
なぜ、意識の謎が解明されても、何の役に立ちそうにないと思われるのでしょうか?
ご返信ありがとうございます。
凄く気になる文章があったため取り急ぎその点についてだけコメントします。
>意識のハードプロブレムが解明されて、何らかの形、たとえばコンピュータ、または有機物で意識を生み出せたとします。
>それは、人間と同じように感じたり思考して、普通に会話もできるものとなります。
>もし、それができれば、あらゆる産業で役に立つと思いますが、そういうことではないのでしょうか?
>なぜ、意識の謎が解明されても、何の役に立ちそうにないと思われるのでしょうか?
『心は体を動かせる』という前提で考えていませんでしょうか?
ご存じかもしれませんが現代の意識にかかわる研究は『心は体を動かせない』ということが前提となっています。
これが食い違っているとまったく話が嚙み合わなくなるので少し詳しく説明します。
非常に重要な点ですので現代の研究ではなぜ『心は体を動かせない』ということが前提となっているかについてお示しします。
まず『人間の意思や思念などのように物理的作用が一切認められていない霊的なもの』が≪脳という物質≫の内部における物理的状態を変化させる(例:ニューロン発火やそれに伴う身体のコントロールなど)というのは念力という超能力(=非科学)に当たります。
もしこういった意思や思念などによる念力が脳という物理世界に介入して操作・コントロールしているとするならば脳という物質内において≪既存の物理法則に反する現象≫が観測されなければならないはずです。
なぜかというと脳内の物理的現象がすべて≪既存の物理法則どおり≫ならばそれは物理的因果のうえで前々から決まっていたことが計画通り処理され続けてるだけということになり『何からも操作されておらず放置されてる』と判断できるからです。
そういうわけで今まで様々な科学者が『意識は物理領域に何らかの影響を与えているのではないか』ということを確認するために人体の脳に対しいろいろな実験を重ねてきましたが『心は体を動かせる』という証拠である念力の観測はただの一回もありませんでした。
この実験結果の蓄積は簡単に言うと『全宇宙における未来の物理的状態はすでに決まっていて人間には変えられない』ということを示唆します。
もちろん量子論などの研究が進みミクロなスケールで何かが否定される可能性はありますが、脳内で物理法則に反する振る舞いが観測されるまでは『心は体を動かせない』と考えるのが『科学的な姿勢』ですので皆それに従っているというわけです。
そういったわけで『意識』は『インプットとアウトプットのあいだに存在する』のではなく『インプットに応じて機械的に処理された結果が行動としてアウトプットされる。それと同時に物理領域外に意識や意思や決断などが現象として発生しては消えてる』という前提で考察されるようになりました。
人間の意識で発生した『意思や決断』はアウトプットと無関係ではなさそうですが、因果的には≪アウトプットの原因にはなりえない≫というコンセンサスがあります。
つまり『同一の機能を有する装置は意識を持っていても持っていなくても振る舞いにまったく差はない』ということです。
もちろん≪意識のハードプロブレム≫もこの前提での話です。
以上の前提で本題に戻ります。
『人間から心的作用を持つように見え、普通に会話もできるコンピュータや有機物があらゆる産業で役に立つ』のはその通りです。
そこで上の条件を満たす≪A≫と≪B≫の二つの装置を想定します。
≪A≫と≪B≫はどちらも人間から見て意識や心を持っているように見えインプットに対する反応は全く同一とします。(機能的に同一ということです)
≪A≫は意識体験やクオリア体験をしない装置とします。
≪B≫は≪A≫と完全に同一の反応をしながら物理領域外に主観的な現象意識やクオリアを体験しその体験が何にも再利用されず捨てられ続けているとします。
さて現在≪A≫は達成できているとします。
今後≪A≫を改良して≪B≫にする研究は何かの役に立つでしょうか?
これについて『ほとんど何の役にも立たない』というのがチャーマーズの意見だと理解しています。
MsTn様
お返事ありがとうございます。
確かに、認識が違うかもしれませんね。
ここは、MsTnさんの主張する内容を中学生でもわかるように、明確にしたいと思いますので、いくつか質問に回答していただけないでしょうか。
1.MsTnさんの主張する内容を、誤解を恐れず、端的に説明すると、霊魂の存在を認めるということですよね。
ここでいう霊魂とは、物理的存在としての肉体とは別の世界に存在して、物理世界や肉体に物理的に干渉せず独立したものであると。
そして、意識とか心は、霊魂の側に属するということです。
これって、心と体が一切干渉しない心身二元論になると思いますが、その認識で間違いないでしょうか?
2.1の考えは、「そういう考えの人もいる」というレベルでなく、「現代の意識にかかわる研究」では、当然のこととされているように書かれていますが、この認識で間違いないでしょうか?
もしよろしければ、ウィキペディアなど、そのことについて記載されたサイトなど教えていただけないでしょうか?
3.MsTnさんの考えでは、この世界、物理世界で起こる出来事は、全て決まっているということでしょうか?
いつ生まれて、どこの学校に入学して、どんな仕事をして、誰と結婚するといったことは、ビッグバンが爆発したときに決まっているということでしょうか?
4.心は体を動かせないということですが、たとえば、ジャンケンをするとして、グーを出そうと思ってグーを出したとします。
これは、心で体を動かしたことにならないのでしょうか?
それとも、グーを出すことは、宇宙の始まりから決まっていて、グーを出そうと思うことも宇宙の始まりから決まってたという解釈でしょうか?
5.
装置≪B≫を作ったとして、それがクオリアを体験してるとMsTnさんを納得させる方法は存在しますか?
存在するけど、その方法はわからないは、存在しないと同義とします。
以上の質問に回答いただけると、MsTnさんの考える意識が、どういうものか、明確になると思います。
これとは別に、前回の質問の回答もお願いいたします。
どうぞよろしくお願いいたします。
ご返信ありがとうございます。
1.
>MsTnさんの主張する内容を、誤解を恐れず、端的に説明すると、霊魂の存在を認めるということですよね。
その通りです。私はその存在を客観的に証明できませんがクオリアや現象意識の存在(=霊魂)を認めます。なにせ今体験している最中ですので。
>ここでいう霊魂とは、物理的存在としての肉体とは別の世界に存在して、物理世界や肉体に物理的に干渉せず独立したものであると。
違います。霊魂は独立したものではなく物理現象に完全に隷属して発生するものと考えています。
つまり『クオリアや現象意識は物理的現象に100%依存しているが霊魂側から物理側への影響は一切ない』という関係性であると考えています。
この考え方はおっしゃる通り二元論ですが『物質と意識は双方向に無関係である』という心身二元論(実体二元論)とは異なります。
心身二元論と区別するために『性質二元論』や『自然主義的二元論』と呼ばれ、より直接的に『随伴現象説』とか単に『付随性』と呼ばれることも多いです。
2.
当然とされているのは1.の考え方ではなく『意識は物理世界に介入していない』という立場です。
https://ja.wikipedia.org/wiki/%E4%BA%8C%E5%85%83%E8%AB%96
>現代の心の哲学の分野における二元論はデカルトの時代のものとは大きく変化しており、
>物理的なものと対置させるものとして、主観的な意識的体験(現象意識やクオリア)を考える。
>その上で性質二元論または中立一元論的な立場から議論を展開する。
https://ja.wikipedia.org/wiki/%E6%B1%BA%E5%AE%9A%E8%AB%96
>人間の判断や行動は、意識とは関わりの少ないモジュールにより決定される。
>この考えによれば、意識は脳の活動に伴う随伴現象であり、自由意志は存在しないか、その役割はかなり限定され、
>意識的な行動で外部に影響を与えているという感覚は(少なくとも大部分は)錯覚にすぎない。
https://ja.wikipedia.org/wiki/%E8%87%AA%E7%94%B1%E6%84%8F%E5%BF%97
>一般的に、「意志は脳の働き」であり、かつ、「脳が物理法則に従う」ならば自由意志はないと考えるのが適当である。
>ただし少数ではあるが、脳内の量子効果と人の意志を結びつけることで自由意志を確保しようとする論者もいる(量子脳理論)[40]。
>決定論と人の意識を結びつけるのに相性がよいのは随伴現象説であり、
>これは「物質の相互作用から意識が生まれ、意識は物質に対して何の因果的作用ももたらさない」とする考えである。
少し拾ってみましたが雰囲気は伝わると思います。
どういった文脈でこの文章が使われているかをご理解いただくためこれらのページの該当箇所周辺に目を通していただくことを推奨します。
3.
ビッグバン仮説が正しいかどうかは私にはわかりませんがビッグバン仮説が正しいとするのであればその通りです。
すべての直接の原因はビッグバンということになります。
ビッグバンのときの膨大なエネルギーが質量を産みつつ宇宙をフォーマットしていき今の物理環境に連なっているという理解になります。
逆に言うとビッグバンの時のエネルギーは意思などという霊的な念力などによって一切汚染されることなく物理法則から一切逸脱せず今に至っていると考えます。
逆に『現時点では観測されていないが、きっと物理法則をゆがませる未知の力が何かしらあるに違いない』という前提に立って論考するのは科学的ではないと考えています。
4.
あらかじめ計画された通り演算処理を行ったにすぎない計算機が『さあ演算処理でもやるか!』とあたかも自分の意志で自主的に演算処理を行ったと思い込むようなイメージです。
グーを出した理由は『脳がグーを出そうと思ったから』です。脳がグーを出そうと思った理由は『グーを出そうと思うほかに選択肢がない物理的環境に脳が置かれていたから』です。
なので必然的にグーを出したいと思ったわけです。
(なお量子力学で波束の収縮が発生しないとする≪多世界解釈≫ではグーを出す未来は『重ね合わせのうちの一つとして存在する』という解釈になります)
それならグーを出したくなる物理的な環境が整った理由は何かと考えれば簡単に『それ以前の物理的な環境(=物理的領域の因果的閉方性)』ということがわかると思います。
そうやって究極の原因を求めていくとすべての原因は最初のエネルギー放出一点にさかのぼり、そこから今まで霊的な念力などで物理因果が汚染されたりは一切していないと考えます。
『物理法則をゆがませる未知の力』が一つも観測できていない状態で『物理因果は何かによって歪められてるに違いない』と考えるのは科学的ではないと思います。
5.
>装置≪B≫を作ったとして、それがクオリアを体験してるとMsTnさんを納得させる方法は存在しますか?
その『納得させる方法』を見つけることが≪意識のハードプロブレム≫ですので現在はもちろん存在しません。
何度も言いますが『何を用意すれば客観的に≪B≫を満たしているということを証明できたと言えるのかすらわからない』という難問が≪意識のハードプロブレム≫です。
『存在するけど、その方法はわからないは、存在しないと同義とします。』という立場は≪新神秘主義≫と分類され二元論ではあるものの『≪意識のハードプロブレム≫は人間には解けない』と完全に白旗を上げた立場になります。
『存在するけど、その方法はわからないから、その方法を探す』立場を≪自然主義的二元論≫(=性質二元論のなかの細かい分類)といい、その立場の人だけが≪意識のハードプロブレム≫(どうすれば≪B≫であることを客観的に証明できたと言えるのか問題)を解決しなければならない境遇に立たされます。
≪意識のハードプロブレム≫が意識に関する研究のメインストリームとなっている現状は≪自然主義的二元論≫が主流であると言えると思います。
なお田方さんが『存在するけど、その方法はわからないは、存在しないと同義とします。』と考えているのであれば『≪意識のハードプロブレム≫は絶対に解けない』と心の中で白旗を挙げているということになります。
また人間の場合≪A≫は≪哲学的ゾンビ≫と呼ばれます。そして≪A≫を作ろうとする(機能的に人間を模倣する)のはイージープログラムです。
>これとは別に、前回の質問の回答もお願いいたします。
承知しました。
コメント60の返信でお尋ねいただいたご質問は4つある認識ですがその全てに回答させていただきますので、その前にコメント59で質問させていただいた≪意識のハードプロブレム≫の定義についてのご認識をお教えください。
>≪意識の仮想世界仮説≫で解決させた≪意識のハードプロブレム≫とは田方さんの定義ではどんな問題でしょうか?何が解決できたのでしょうか?
4つのご質問について田方さんの定義を交えながらお答えいたします。
MsTn様
返信、ありがとうございます。
1.2の回答を読ませていただき、該当するwikiも読ませていただきました。ここは、以前から読んでおりました。
wikiには、さまざまな見解を紹介していて、そのうちの一つが、MsTnさんのいう性質二元論となっております。
ここは問題ありませんよね。
僕が知りたいのは、このwikiのどこから、現代の意識にかかわる研究では「性質二元論」や「随伴現象説」が当然のこととされてると言えるのかです。
そのような記載が見つからなかったので、再度、確認させていただいてもいいでしょうか?
3.4の回答から、MsTnさんは、「いつ生まれて、どこの学校に入学して、どんな仕事をして、誰と結婚するといったことは、ビッグバンが爆発したときに決まっている」と考えてるというわけですね。
この考えは、少なくとも、世間一般に広く受け入れられてる考えとは言えないと思います。
先ほどのwikiの自由意志の物理学の項目のすぐ下の生物学の項目には、現代の生物学の一般的な合意は、遺伝の影響と環境の影響が複雑に絡み合っていると記載されております。
つまり、人の運命は生まれながらに決まっていることもあれば、教育によってかわることもあるというのが、生物学の一般的な合意となっております。
この生物学の一般的な合意とMsTnさんの意見とは違うということで間違いないでしょうか?
5に関しては、別の角度から再度、質問させてください。
MsTnさんがいう意識のハードプロブレムの証明というのは、神の証明と同じように聞こえます。
昔から、神の存在を証明しようとしてきましたが、まだ、だれも証明できていません。
でも、神の存在を信じる人は、神が絶対いるし、証明もできると思っているようです。
MsTnさんのいう意識のハードプロブレムの解決というのは、この神の証明と同じタイプの問題と思うのですが、その認識でまちがいないでしょうか?
もし、違うのでしたら、どこが違うか教えていただけないでしょうか?
その前に、今回の質問のまとめとして、お伺いしますが、MsTnさんが信じる「性質二元論」や「随伴現象説」は、絶対に正しく、それに反することは、MsTnさんは受け入れることはないということで間違いないでしょうか?
それから、できれば、中学生でもわかるような分かりやすい言葉で説明していただけると助かります。
送信ボタンを押す前に読み直して、中学生でもわかる言葉だけになってるか確認するといいと思います。
ご協力のほど、どうぞよろしくお願いいたします。
ご返信ありがとうございます。
未回収のまま散らかってしまうので、まずは新たなご質問の前にコメント59にて質問させていただいている以下の内容を簡潔にお教えください。
>≪意識の仮想世界仮説≫で解決させた≪意識のハードプロブレム≫とは田方さんの定義ではどんな問題でしょうか?何が解決できたのでしょうか?
上記ご回答を踏まえてまずはコメント60への4つのご質問に回答いたします。
然る後コメント62へのご質問にも回答させていただきます。
どうぞよろしくお願いいたします。
MsTn様
お返事、ありがとうございます。
たしかに、このままでは散らかってしまいますので、ここらで整理した方がいいですね。
今までの議論で、MsTnさんの主張がかなり明確になりましたので、両者の意見をここで整理しようと思います。
中学生でもわかるように説明しますので、もし、間違いがありましたらご指摘ください。
まず、MsTnさんの考える意識についてです。
大前提となっているのは「意識の随伴現象説」です。
「意識の随伴現象説」とは、脳と意識の関係は、工場と煙の関係のようなものという考えです。
工場で何かを製造すると煙突から煙がでます。でも、煙を出したら、工場で物が製造されるわけではありません。工場が脳(身体)で、煙が意識というわけです。これが随伴現象説です。
つまり、意識は身体を観察するだけで、意識から身体を動かしたり、影響をあたえることができません。
さて、意識理論はいくつもあるのですが、MsTnさんがいうには、この随伴現象説が、現代の意識研究で常識とされてるとのことです。
それから、意識は身体に影響を与えることができないだけでなく、我々の運命というのは生まれる前から決まっているとMsTnさんは考えておられるようです。
つまり、いつ生まれて、どこの学校に入学して、どんな仕事して、誰と結婚するといったことはビッグバンが爆発したときにすでに決まってたとMsTnさんは主張します。
つまり、勉強してもしなくても、大学に落ちるか合格するかは最初から決まってるというわけです。
それどころか、ジャンケンでグーをだすかパーをだすといったことまで、ビッグバンが爆発したときに決まってるとのことです。
そして、意識とは、そういう自分をただ観察して、感じたり、考えたりするだけの存在というわけです。
以上の理解で間違いないでしょうか?
次に田方の考える意識について説明します。
僕は、意識理論は、どれが正しいか、まだ決まってないと思っています。
個人的には、意識の随伴現象説には反対です。つまり、意識が身体に影響を与えることはあると思っています。
ジャンケンでグーをだすか、パーをだすか、自分の意志で決めることができると思っています。
もちろん、生まれる前から運命が決まってるとは考えていなくて、「勉強しても、勉強しなくても結果が決まってるので、勉強するだけ無駄だ」といった考えは間違っていると思っています。
僕が提唱する「意識の仮想世界仮説」も、意識が身体に影響を及ぼすことが可能となります。
「意識の仮想世界仮説」は、僕が個人的に提唱する仮説ですが、現代科学の意識理論として有名なものに、情報統合理論(IIT)、自由エネルギー原理(FEP)、グローバルワークスペース理論(GWT)などがあります。
これらは世界中の大学や研究機関で国家予算で研究されているもので、現代の意識科学の主流と言ってもいいと思います。
そして、これらは、どれも意識が身体に影響を及ぼすことを否定していません。つまり、意識の随伴現象説に反します。ということは、これら現代科学の主流の意識理論は、MsTnさんの考えでは、どれも間違ってるとなるわけですよね。
さて、以上を踏まえて、本題の意識のハードプロブレムの解決とは何かについて考えます。
ハードプロブレムの反対にイージープロブレムというのがあります。イージープロブレムとは、脳(身体)の中で、物理現象で解明できるものになります。
それから、意識とは、心で考えたり感じたりする主体です。
そして、意識のハードプロブレムとは、この意識と脳(身体)との関係がわからないと言うことになります。
ここまでは問題ないですよね。
MsTnさんの考える意識は、身体に影響を及ぼすことはできず、ただ、感じたり考えたりするだけの存在なわけですよね。
つまり、そのような関係になってる意識と脳(身体)の仕組みを解明できれば、それが意識のハードプロブレムの解決となるのでしょう。
間違っていたらご指摘ください。
田方が考える意識は、意識が脳(身体)に影響を及ぼすことができることが前提となっています。
そのような前提において、感じたり考えたりする意識と、脳(身体)との関係が解明されたら、意識のハードプロブレムの解決となると考えています。
ただし、これは意識の随伴現象説に反することなので、MsTnさんに言わせれば、意識のハードプロブレムを解決したことにならないとなりますよね。
以上のように整理することで、論点が明確となりました。
論点は、意識の随伴現象説が、正しいのか、正しくないのかです。
もし、意識の随伴現象説が正しければ、田方は意識のハードプロブレムを解決したことにならないとなります。
MsTnさんは、意識の随伴現象説が現代の意識科学では常識とおっしゃいますが、その根拠はどこにあるのでしょうか。
たとえば、ウィキペディアの「随伴現象説」の項目を見ましたが、随伴現象説が現代の意識研究で常識であるとか、主流の考えであるとはどこにも記載されておりません。
MsTnさんが、なぜ、随伴現象説が現代の意識研究の常識であると主張するのか、その根拠となるサイトなどを示していただけないでしょうか。
それを示していただけると、全て解決すると思われます。
回答、お待ちしております。
回答の際は、中学生でもわかる言葉で書いてくださいね。
ご返信ありがとうございます。
>田方が考える意識は、意識が脳(身体)に影響を及ぼすことができることが前提となっています。
1)
脳が『これなら絶対にニューロン発火するでしょ』って状態のときにニューロンが発火したり、
『これなら絶対にニューロン発火できないはず』って状態のときにニューロンが発火しなかったりするのは、
物理法則上、必ずそうなることなので何の不思議もないことですよね。
こういう感じで『脳の中の原子や素粒子やエネルギーとかの働きはぜんぶ物理法則どおり』っていうのなら、
『人間のやることは全部物理法則どおり』ってことになるから、『人間のやることはさいしょから全部決まってる』ってことになります。
2)
脳が物理法則上『これなら絶対にニューロン発火するでしょ』って状態なのに≪意識≫が無理やりニューロン発火を阻止できたり、
『これなら絶対にニューロン発火できないはず』って状態なのに≪意識≫が無理やりニューロンを発火させることができたり、
≪意識≫がそういう物理法則を無視して現象をコントロールできる神のような力を持っているとしたら。
≪意識≫は脳の中の原子や素粒子やエネルギーとかの動きを物理法則に反して自由に操作できるような≪念力≫を持ってるってことになって
『人間は物理法則から外れた動きをする』ってことになるから、『人間の未来は予測不可能』ってことになります。
こう考えたとき、田方さんは2)の前提に立っているってことですよね?
でも≪物理法則を無視して脳内の物質を自由に操作できる念力≫の存在とか法則性ってまだ客観的に証明されていませんよね?
もちろん≪存在や法則性が客観的に証明されていない現象≫に仮説を立てて、その実態や働きを考察するのやりかたは立派な科学です。
今までの科学はぜんぶそうやって未知の現象を予測可能なものにしてきたんですから。
でも≪物理法則を無視して脳内の物質を操作する念力≫を前提とした仮説を『証明』したり『解明』したりするには、
まずその前に≪念力≫の存在や法則性を客観的に証明しなければならないですよね?
≪念力≫の存在や法則性は私の知らないところですでに客観的に証明されているのでしょうか?
それとも田方さんご自身が≪念力≫の存在や法則性を客観的に証明したのでしょうか?
はたまた田方さんの研究は科学ではないということなのでしょうか?
>そのような前提において、感じたり考えたりする意識と、脳(身体)との関係が解明されたら、意識のハードプロブレムの解決となると考えています。
田方さんにとって≪意識のハードプロブレム≫は『感じたり考えたりする意識と、脳(身体)との関係』なんですね。
つまり田方さんは≪意識の仮想世界仮説≫で『感じたり考えたりする意識と、脳(身体)との関係』を解明したんですね。
『解明』っていうのは『感じたり考えたりする意識と、脳(身体)はこういう関係がある』って勝手に口で言うだけだったり
『たぶんこうなんじゃないかな』って仮説を立てるだけじゃなくて、
『感じたり考えたりする意識と、脳(身体)との関係』が田方さん以外の人にでも確かめられる実験方法を見つけたという意味だと思います。
でも『感じたり考えたりする意識』の存在って客観的に存在が証明されていませんよね?
『感じたり考えたりする意識と、脳(身体)との関係』を解明するには、
まずその前に『感じたり考えたりする意識』が本当に存在することを客観的に証明しなければならないですよね?
『感じたり考えたりする意識』の存在は私の知らないところですでに客観的に証明されているのでしょうか?
それとも田方さんご自身が『感じたり考えたりする意識』の存在を客観的に証明したのでしょうか?
はたまた田方さんの研究は科学ではないということなのでしょうか?
>回答の際は、中学生でもわかる言葉で書いてくださいね。
ごめんなさい。さっぱり目的が分かりません。
中学生でもわかるように気を配らなければいけない理由は何なのでしょうか?
必要性が納得できれば協力するかもしれませんので、その縛りが必要な理由をお教えください。
もしどうしても必要なら田方さんがわたしの書き込みの内容を理解して中学生にもわかるように翻訳するぶんには構いませんので、ご検討ください。
どうぞよろしくお願いいたします。
MsTn様
前回の僕の回答を最後まで読まれましたでしょうか?
前回の僕の回答には、僕とMsTnさんとの間で、何が焦点となってるか明確に書いてありまして、それは、MsTnさんの回答によって決着がつくものです。
以下に、その最も重要な質問を再掲いたします。
もし、答えたくなければ、「答えたくない」と一言だけ回答していただくだけで構いませんので。
どうぞよろしくお願いいたします。
ご返信ありがとうございます。
申し訳ございません。
そのほかの文章は全て的外れで、まったく意味のない文章だったので割愛させていただきました。
この話が終わったあとたまっているご質問にお答えしていくつもりですが、
その過程でまったく無意味なコメントだったという事がおわかりいただけるはずだと考えたため、
とりあえず急いで回答する必要はないと判断したためです。
気になっているようですので先にポイントだけ書きますね。
わたしは『現代の意識にかかわる研究では「性質二元論」や「随伴現象説」が当然のこととされてる』なんて思ってもいませんし書いてもいません。
むしろそう勘違いしているかもしれないと危険に思ったので、わざわざ
>当然とされているのは1.の考え方ではなく『意識は物理世界に介入していない』という立場です。
と書いて注意を促したほどです。
ちなみに≪性質二元論≫や≪随伴現象説≫は私個人の主張で、≪性質二元論≫はともかく≪随伴現象説≫はどちらかというと異端だと思います。
(『この考え方だと随伴現象説が正しいってことになっちゃうからダメだ』というような≪ダメな考え方≫という捉えられ方が多いと思います)
なぜ『意識は物理世界に介入していない』ことが当然とされているかについては一つ前に書いたことも少し関連していますが
田方さんの研究についてのお話が終わり次第もう少し掘り下げて解説いたしますので、
まずは≪意識の仮想世界仮説≫で解決した≪意識のハードプロブレム≫が何なのかについて、引き続きご解説をお願いいたします。
どうぞよろしくお願いいたします。
MsTn様
何度も同じ質問して申し訳ございません。
僕が聞きたいのは、まさに、この部分にあります。
「意識は物理世界に介入していないが当然」とされてるとのことですが、寡聞にして聞いたことがありません。
そういう意見もあるということでしたらわかるのですが「当然」とまで言い切るには、wikiなどに、そのように記載されてるのかと思ったからお伺いしました。
知りたいのは掘り下げた解説とかでなく、「意識は物理世界に介入していないが当然」と書かれた信頼のおけるサイトとなります。
もし、そのようなサイトがありましたら、そのURLを教えていただけないでしょうか?
もしご存じなければ、そうおっしゃっていただければと思います。
それほどお手間を取らせることはないと思いますので、どうぞよろしくお願いいたします。