 シンボルグラウンディング問題(記号接地問題)が解決しました1
シンボルグラウンディング問題(記号接地問題)が解決しました1 言葉の意味をどう定義するか
言葉の意味をどう定義するか 「ロボットの心」を作るってどういうこと?
「ロボットの心」を作るってどういうこと? 意識の仮想世界仮説とは
意識の仮想世界仮説とは
【マインド・エンジン】絶対不可能といわれていたコンピュータによる言葉の意味理解。ついに成功したので公開します。
今回は、前回の「シンボル・グラウンディング問題(記号接地問題)が解決しました1」の続きとなります。
オリジナルのシンボルグラウンディング問題を例にあげ、さらにディープラーニング、話題のAIスピーカー、意識の仮想世界仮説との関係を説明します。
シンボルグラウンディング問題は、スティーヴン・ハルナッド氏によって1990年に命名されました。
氏は、シマウマを例に挙げて説明しています。
「シマウマ」とは、「シマ模様のある馬」と定義できます。これは、言葉(記号)で「シマウマ」を定義したものです。
「シマウマ」を見たことがない人でも、この説明を聞いて、初めてシマウマを見たとき、「シマ模様のある馬だ。あれが話に聞いていたシマウマか」とわかるでしょう。
それでは、AIにシマウマの定義を教えて、同じように、シマウマを見た時、これが「シマウマ」だとわかるでしょうか?
AIにとって「シマ模様のある馬」という説明は、単なる文字(記号)の羅列にしか過ぎません。
AIは、単なる記号の羅列と、現実世界に存在する「シマウマ」とを結びつけることができません。
これがシンボルグラウンディング問題(記号接地問題)というわけです。
人間が話す言葉(自然言語)は、記号によって成り立っていますので、シンボルグラウンディング問題が解決できないかぎり、人間と普通に会話できるAIはできません。
それでは、ロボマインド・プロジェクトでは、どのようにして、シンボルグラウンディング問題を解決するか見ていきましょう。
ロボマインド・プロジェクトでも、最初は、「シマウマとは、シマ模様のある馬」と教えます。この段階は、まだ、記号によって意味を定義しただけとなります。
前回説明したように、ロボマインド・プロジェクトでは、現実世界にある物体を3DCGで記憶します。
つまり、馬や象、家など、あらゆる物体の3DCGを記憶しています。これが知識です。
下の絵は、3DCGで描画したシマウマです。

3DCGの3次元形状は、下の絵のように、複数の多角形の集合からなる3Dモデルで表現されます。
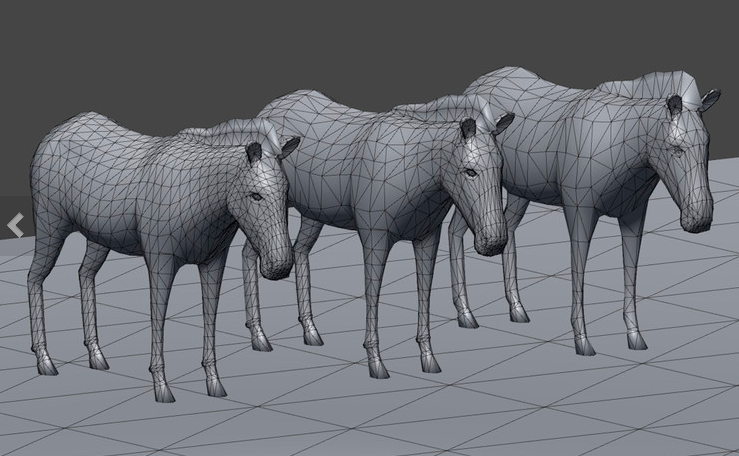
この3Dモデルの表面に画像を張り付けて3DCGが完成します。貼り付ける画像をテクスチャといい、テクスチャを貼り付ける処理をテクスチャマッピングといいます。
ロボマインド・プロジェクトでは、「言葉の意味をどう定義するか」で説明したように、単語を概念で管理しますので、「シマウマ」は「馬」概念以下に属します。
また、「馬」は、3次元世界に存在する物体なので、3Dモデルの3次元形状のデータを持ちます。
これらを踏まえて、どのようにして、現実世界のシマウマを、シマウマと認識するのか見ていきましょう。
まず、現実世界の物体である「シマウマ」を撮影し、撮影画像から3Dモデルを生成します。
つぎに、生成した3Dモデルと、システムが知識として持つ3Dモデルと形状を比較し、「馬」の3Dモデルとほぼ一致すれば、目の前の物体が、「馬」であると認識することができます。
「シマ模様」という単語は、「模様」概念以下に属します。
先ほど説明したように、3DCGでは、3Dモデルの表面にテクスチャを貼り付けます。テクスチャには、色や模様などが描かれます。
「シマ模様」とは、このテクスチャに描かれる2次元画像のパターンで、言葉で説明すると、「2色以上の異なる色が平行する線で構成される模様」となります。
実際には、「シマ模様」の意味は、言葉で記述するのでなく、2次元画像のパターン認識で使用される画像処理アルゴリズムとして記述されます。
この場合の画像処理アルゴリズムとは、白と黒の縦棒の線が交互に現れる模様を、白黒のシマ模様とパターン認識することです。
したがって、生成した馬の表面にシマ模様が存在するか、画像処理によって確認することができます。
このようにして、現実世界に現れた「シマウマ」を見て、まず、形状から「馬」であると確認でき、次に、馬の表面に現れる模様が、パターンマッチングにより「シマ模様」だと判断し、「これが、話に聞いていたシマウマだな」と認識することができるのです。
このようにして、シンボルグラウンディング問題に陥ることなく、現実世界のシマウマが、システム内の記号である「シマウマ」に、無事、接地(グラウンディング)できたのです。
一般に、自然言語処理では、言葉の意味を「概念」(is-a)と、「何を持つか」(has-a)で定義します。たとえば、「馬」の意味は、「哺乳類概念に属し、4本の脚を持ち、脚はヒヅメを持ち・・・」と定義することができます。
こうやっていくら細かく定義しても、脚やヒヅメという単語(記号)が、現実世界の物体と結びつかないかぎり、「馬」という単語が、現実世界の馬に結びつくことはありません。
ロボマインド・プロジェクトでは、現実世界の物体を3DCGで表現し、それに「馬」という記号を与えました。
したがって、現実世界の物体が「形状」(3Dモデル)を介してシステム内の記号と結びつけることができたのです。
「シマ模様」の意味も同様です。
「シマ模様」は、3DCGで使われるテクスチャと結びついていて、2次元画像のパターン認識のアルゴリズムで記述されます。
3Dモデルの形状を介して現実世界の物体と、システム内の3Dモデルがつながっているので、さらに、3Dモデルの表面の模様も、現実世界の物体の模様とつながることができるのです。
現実世界に存在する物の意味を記号で表現するのでなく、3Dモデルで表現することで、現実世界に存在する物とシステム内の記号とを結びつけることができたのです。
最近では、画像認識はディープラーニングがよく用いられます。写真を見て、「シマウマ」かどうか判断することは、ディープラーニングでも可能です。この意味では、ディープラーニングも、シンボルグラウンディング問題を解決したといえます。
しかし、正面から見たシマウマと、後ろから見たシマウマでは、全く異なる画像となるので、ディープラーニングでは正面から見たシマウマと後ろから見たシマウマを同じシマウマと認識することができません。
それに対して、シマウマを3Dモデルとして持たせると、正面から見たシマウマも、後ろから見たシマウマも、同じシマウマを別の角度から見たものと認識できます。さらに、歩いているシマウマ、走っているシマウマ、横たわっているシマウマなどのデータを持たすことで、どのような状態であっても、シマウマと認識することができます。
さて、現在でも言葉を使ったAIシステムが数多くあります。
特に今年は、グーグルやLINE、アマゾンからAIスピーカーが続々と発表されて話題となっています。

AIスピーカーは、「エアコンをつけて」とスピーカーに話しかけるだけで、エアコンの電源を入れてくれます。
人間に話しかけるのと同じです。
それでは、AIスピーカーは、シンボルグラウンディング問題を解決しているのでしょうか?
AIスピーカーが、どのようにして言葉を理解しているか見ていきましょう。
AIスピーカーには、あらかじめBluetoothでエアコンを接続しておきます。さらに、これに「エアコン」という言葉を結び付けておきます。
また、エアコンのオン/オフには、「つける」「消す」という言葉を結び付けておきます。
これによって、「エアコンをつけて」と言われれば、音声認識によって「エアコン」と「つけて」という単語を抽出し、接続されている「エアコン」のスイッチを入れることができます。
これは、シンボルグラウンディング問題を解決しているといえるのでしょうか?
AIスピーカーとエアコンとはBluetoothでつながっています。
これだと、エアコンは、AIスピーカーのシステムの一部といえます。
つまり、システムの外部にある現実世界にある物を記号に置き換えて操作しているのでなく、システムの一部を、言葉で操作しているだけなのです。
いってみれば、エアコンのリモコンが、音声対応になっただけなのです。
たしかに、AIスピーカーは、「天気予報を教えて」といえば、「晴れ」とか「雨」と教えてくれますが、これは、天気予報を検索して、返ってきた「晴れ」とか「雨」という単語を音声で答えているだけです。
記号と記号とが結びついているだけで、現実世界の「晴れ」や「雨」の意味を理解しているわけではありません。
これは、「『ロボットの心』を作るってどういうこと?」の第二の物語のロボットと同じです。
たとえば会社から帰ってきて、
「今朝、『雨が降るから傘をお忘れなく』と言ってくれたから、傘を持って行って助かったよ。」などとAIスピーカーに話しかけても、
「どういたしまして。ご主人様が雨で濡れなくて本当によかったです」
などと答えてくれるわけではありません。
このような会話ができるには、以下のことが理解できないといけません。
「雨」が降ると、人は水に濡れる。
水に濡れるとは、マイナスの出来事で、そのマイナスの出来事は、「傘」によって防げる。
「傘」を持って行くことができたのは、朝、会社に行く前に、「傘を持って行くように」と自分が主人に教えたことが原因。
今、そのことで自分は主人から感謝された。
感謝に対する返答は、「どういたしまして」である。
主人が、マイナスの出来事に遭わなかったので、自分にも嬉しいという感情が生まれた。
これだけのことが全て理解できて、はじめて、
「どういたしまして。ご主人様が雨で濡れなくて本当によかったです」と答えることができるのです。
人間の言葉の意味を理解するのがロボマインド・プロジェクトの目的ですが、それを可能にしたのは、人間の意識の解明です。
ロボマインド・プロジェクトが前提とするのは、人間の意識は、現実世界を直接認識しているのでなく、現実世界を仮想世界として構築し、その仮想世界認識するという「意識の仮想世界仮説」です。
これを先の「シマウマ」の認識の説明に当てはめてみます。
まず、現実世界を撮影し、現実世界の物体を3Dモデルとして生成します。これが仮想世界の構築にあたります。
つぎは、この現実世界から生成した3Dモデルと、システムが知識として持つ「馬」の3Dモデルとを比較して「馬」と認識して、システム内の「馬」という記号に置き換えます。
いったん、「馬」という記号に置き換えられると、「馬」という記号に結びつけられた他の記号と記号操作ができるようになります。
たとえば、「馬」の模様が「シマ模様」だと認識できれば、記号「馬」は記号「シマ模様」を持つと言い換えれます。これは、「シマ模様のある馬は、シマウマである」と言葉(記号)で記述された説明に合致すると判断できるので、「シマウマ」であると判断できます。
記号操作とは、こういうことです。
このような記号操作は、意識が処理する部分となります。
先ほどの、「傘をお忘れなく」の会話も、記号操作ができてはじめて可能なのです。
まとめると、外の現実世界を3Dで認識し、記号に置き換える部分までが無意識で、いったん記号で置き換えられたものを操作するのが意識といえます。
つまり、意識は、外の現実世界を直接認識するのでなく、無意識が記号の変換した仮想世界を認識しているのです。
よく意味が解らないという方は、「意識の仮想世界仮説」も、あわせてお読みください。
YouTubeでも語っていますので、あわせてご覧ください。


ロボマインド・プロジェクトの最新情報はYouTubeで!







[…] シンボルグラウンディング問題(記号接地問題)が解決しました2 https://robomind.co.jp/symbolgroundingproblem2/ […]
記号接地問題と言うのは意味としてきちんと理解しているかどうかということだと思うんですけれど、
そうなると、代表的な画像がある程度の枚数必要だと思うんです。
ルドルフカルナップの意味論序説を改めて読んでいるんですけれど、
記号論の意味と言うものでは、やはり記述がどうのと言うことで、
それよりも、代表的プロトタイプが揃えられるかということが問題じゃないのかと思います。
いしざき様
コメントありがとうございます。カルナップの意味論、少し調べてみましたが、思った以上に、僕のやろうとしてることに近いですね。
ロボマインド・プロジェクトは、今、YouTubeで全体像を語ろうとしてまして、今、意識編に入っています。
この意識編の目標の一つが、シンボルグラウンディング問題となります。
意識で整理すると、シンボルグラウンディングを、もっと分かりやすく説明できると思いますので、ぜひ、今後のYouTubeをご覧ください。
https://robomind.co.jp/somosomoisiki/
コンピューターが3Dモデルを使って現実を認識することと、人が想像や空想を通じて現実を認識していることが近いのかなと理解しました。
私は本物のシマウマを見たことがないので、その匂いとか迫力とかは分かりませんが、動画や絵で認識しています。コンピューターが参照する3Dモデルに、動きや音や匂いの情報を加えられればさらに現実認識に近くなるのでしょうか?
かにかまさま
はい、動きや音、匂いなどの感覚の情報が加われば、さらに現実に近づきますね。