 シンボルグラウンディング問題(記号接地問題)が解決しました2
シンボルグラウンディング問題(記号接地問題)が解決しました2 フレーム問題が解決しました -フレーム問題に見る、AI史の闇-
フレーム問題が解決しました -フレーム問題に見る、AI史の闇- 言葉の意味をどう定義するか
言葉の意味をどう定義するか 自然言語処理って、こんなこともわからないの?
自然言語処理って、こんなこともわからないの?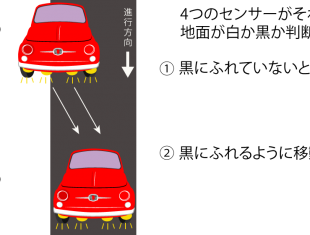 主観と客観 -自分って何?客観的に自分を見れるって、何ががすごいの?-
主観と客観 -自分って何?客観的に自分を見れるって、何ががすごいの?-
【マインド・エンジン】絶対不可能といわれていたコンピュータによる言葉の意味理解。ついに成功したので公開します。

今日は、AIロボット、ロボ太の初めてのアルバイトの日です。
ロボ太は、お好み焼き屋でアルバイトをすることにしました。
さっそく、二人連れのお客さんがやってきました。
ロボ太 「いらっしゃいませ」
客 「僕は、焼きそば。こいつは、お好み焼き、ブタ玉で。」
ロボ太は、いきなり焦りました。
「僕は、焼きそば」と自己紹介したということは、この人は、「焼きそば」なのか?!
見た目は人間なのに、焼きそばとは。
で、もう一人は、お好み焼きなのか。
しかも、ブタ玉!
どうも、画像認識機能にバグがあるようだ。
博士にいって、修正してもらわねば。
客 「それから、お好み焼きには、マヨネーズを、たっぷりかけてちょうだい」
ロボ太 「えっ、お好み焼きさんに、マヨネーズをかけるのですか?」
客 「うん。端までたっぷりかけてあげてよ」
変な要求だなぁと思いつつ、ロボ太はマヨネーズを取り出し、もう一人の客の頭の上からたっぷりとマヨネーズをかけ始めました・・・
店長 「ロボ太!、おまえはクビだー!」
さて、どうしてこんなことになってしまったのでしょう。
原因は、外部世界にある物と、ロボ太の頭の中に思い描いたものが正確に結びつかなかったからです。
この現象のことを「シンボルグラウンディング問題」または「記号接地問題」と呼びます。
これは、「フレーム問題」と並んで、AIの未解決問題として有名です。
今回は、この、シンボルグラウンディング問題について説明いたしましょう。
シンボルグラウンディング問題が起こるのは、外部世界にある物を、内部で記号に置き換えて処理するシステムに限ります。
したがって、ライントレーサーのように、センサーからの信号に直接反応するだけのロボットでは、シンボルグラウンディング問題は起こりません。
ライントレーサーとは、紙に描かれたラインに沿って走行するマイコンロボットのことです(参考:「主観と客観」)。

人は、外部世界にある物に名前を付けます。
名前を付けた単語、これは、一種の記号です。
名前を言えば、その物を頭の中でイメージし、操作することができます。
これが記号処理です。
外の世界にある物と、内部の記号とがうまく結びつかない現象、これがシンボルグラウンディング問題(記号接地問題)です。
もう少し詳しく説明します。
人と同じように、AIも、外部世界にある物を、内部で単語で管理します。
「言葉の意味をどう定義するか」で説明したように、ロボマインド・プロジェクトでは、単語を、「概念」と「Has-a」の関係で管理します。
「Has-a」の関係とは、何が何を持つという関係です。
「家」は、「ドア」、「屋根」、「部屋」を持っていて、「部屋」は、「床」、「天井」、「壁」を持っていて、「壁」は「窓」を持つと管理します。
また、位置関係も管理され、「家」の「上」には「屋根」、「家」の「下」には「地面」、「部屋」の「上」には「天井」、「下」には「床」とデータベースに登録されます。
このようにデータを記憶することにより、「部屋の中で、上を見ると何が見えますか?」という質問に、「天井が見えます」と答えることができます。
しかし、「部屋の窓から外を見ると、上には何がみえますか?」という質問には、「部屋の窓の外」の「上」というデータが存在しないので、答えることができません。
これに答えることができるようにするには、「窓の外は上が空、下が地面」とデータベースに登録する必要があります。
また、「部屋のドアから廊下に出ると、上には何が見えますか?」と質問されると、これにも答えることができません。
これに答えることができるようにするには、「部屋のドアの外の廊下の上は天井」とデータベースに登録する必要があります。
こんな簡単な会話をするだけでも、膨大なデータを登録しなければならないのです。
人と普通に会話ができるようにするには、無限に近い膨大なデータベースが必要になるわけです。
最近のAIは、画像認識から自動車の運転まで、人間ができることの多くができるようになってきましたが、未だに、簡単な日常会話すらできない原因は、ここにあります。
ロボマインド・プロジェクトでも、同じ問題に直面しました。
我々、人間は、「ドアの外の廊下の上には天井がある」などと覚えているわけではありません。
それでは、どうやって、認識しているのでしょう?
頭の中で、部屋からドアを開けて廊下に出たところを想像するだけです。
廊下に出れば、上には天井がありますよね。
それでは、これを、コンピュータで実現するにはどうすればいいでしょうか?
それには、家の3DCGモデルを作れば実現できます。
データベースを使うのでなく、実際に見えるままの姿を3Dモデルで作成するのです。

3Dモデルですから、外からみた家の姿だけでなく、家の中に入れば、「廊下」や「部屋」も見えます。
「部屋」に入れば、「床」や「天井」や「壁」があり、「壁」には「窓」があり、「窓」から外が見えます。
このような3Dデータを持っていれば、「窓から何がみえますか?」といった質問にも答えることができます。
つまり、データベースでなく、3Dモデルを使うことで、シンボルグラウンディング問題を解決することができるのです。
シンボルグラウンディング問題が起こる原因は、人間が頭の中で想像している物とは異なる「データベース」という形式で、現実世界を無理やり管理しようとしたから起こったのです。
それでは、なぜ、そのような人間の理解とは異なる形で理解しようとしたのでしょうか?
それは、データベースを使うのが簡単だからです。
コンピュータの世界では、データを管理するのに、データベースを使うのが当然だからです。
それだけの理由です。
しかし、原因が分かったからと言って、簡単に解決できるものではありませんでした。
僕も、なんとかデータベースだけで、現実の3次元世界を正確に認識できないかと、かなり試行錯誤していました。
そこまでしてデータベースを使い続けたのは、プログラムの開発環境に原因があります。
データベースを使うような一般的なプログラムと、3Dモデルのようなプログラムとでは、同じプログラムでも全く別物なのです。
3D物理シミュレーションというものが存在することは知っていましたが、普通はゲームで使われるもので、文書を扱う一般的なビジネス用プログラムで扱うことはまずありません。
それが、調べたところ、最近は、3Dゲーム開発環境がかなり整ってきて、3D物理シミュレーションを使うことも可能なことがわかってきました。
専門的な話をすると、ロボマインド・プロジェクトは、C#というプログラミング言語を使っていて、3Dシミュレーションの開発には、Unityという3Dゲーム開発環境を使います。
自然言語処理のコア部分は、C#で開発したプログラムで動作し、3次元空間の操作が必要な部分は、Unityのプログラムを呼び出します。
「窓から外を見ると、上には何が見えますか?」という文を読むと、C#側のプログラムで、この文を解析し、3次元世界の話だと判断すると、Unity側のプログラムを呼び出します。
Unity側のプログラムは、家の3Dモデルを構築し、窓の外で上に存在するオブジェクトを取得します。
この場合、「空」となります。この答をC#側のプログラムに返します。
これによって、C#側のプログラムで、質問に答えることができます。
このようにして、人間が頭の中でイメージしていることと同じことをコンピュータ内でシミュレーションすることができます。
これにより、ようやく、シンボルグラウンディング問題の解決の目途が立ってきたのです。
逆に言えば、シンボルグラウンディング問題は、3Dゲーム開発環境が整ってきた現代だから解決できると言えます。
1960年代の第1次AIブームや、1980年代の第2次AIブームでは、アイデアはあったとしても、技術的に難しかったといえるのです。
人間の頭の中でイメージすることと同じことを3Dモデルでコンピュータ内に構築することで、シンボルグラウンディング問題が解決しましたが、それは、3次元の理解に限られます。
では、3次元以外の理解は、どうでしょう?
物理的に存在するものに限らず、「感情」といった物でも、人が頭の中で操作するものと同じモデルをコンピュータ内に構築し、操作することで、シンボルグラウンディング問題が生じることなく、理解することが可能となります。
この感情の抽出という処理は、ロボマインド・プロジェクトで中核をなす部分ですが、この部分は、データベースを使って比較的簡単に実現できるのです。
日常会話で一番難しいのは、実は、感情の抽出より、それ以前の文の意味を理解する部分なのです。
たとえば、
「昨日の夜、窓から外を見たら、流れ星が見えたよ」
という会話の意味理解を考えてみましょう。
「流れ星」は、「珍しい」「美しい」「プラスの価値がある」とデータベースに登録さえしていれば、「よかったね」「きれいだった?」と答えれば自然な会話が成立します。
その前の文の「窓の外を見たら」の意味は、どう考えたらいいでしょうか?
特に、何も問題ないですよね。
それでは、
「昨日、床から天井を見たら、流れ星が見えたよ」
と言われれば、どうでしょう?
「流れ星」の話以前に、「床から天井を見たって、どういうこと?」となりますよね。
これが指摘できるということは、「窓の外を見る」は問題なくて、「床から天井を見る」はおかしいと判断できているということです。
人が、当たり前に処理している3次元空間の理解。
これがシンボルグラウンディング問題の本質なのです。
次回「シンボルグラウンディング問題が解決しました2」では、シンボルグラウンディング問題が最初に提示された「シマウマ問題」をいかに解決するかについて説明します。
YouTubeでも語っていますので、こちらもご覧ください。


ロボマインド・プロジェクトの最新情報はYouTubeで!







AIに内的な世界を持たせようとした場合、今度はまたフレーム問題にぶち当たるのではないでしょうか?
現実世界と3Dモデルの大きな違いとして、3Dモデルの場合には各オブジェクトに「名前」や「属性」、「境界」といった情報が埋め込まれていますが、現実世界にはそれがありません。
現実世界をモデリングする際、有限な計算資源を使ってどこまで詳細に再現するかを決めねばなりません。
コメント、ありがとうございます。
現実世界に存在するすべてのデータを扱おうとすると、たしかに、おっしゃるとおりフレーム問題がおこると思います。
そこで、僕が提案するのは、対象とするオブジェクトの何に注目しているかで、そのオブジェクトの持つ情報を、無意識が絞り込みながら処理するというものです。
たとえば、目の前の机について、二人で話しているとします。
相手が、「この机は使いやすそうだね」といったとしたら、無意識が「机 使いやすい」で検索して、「大きい」「引出しが多い」などのデータを抽出します。
意識は、抽出したデータから、「これだけ大きいと、本や書類を広げて仕事しやすいよね」とか、「引出しが多いから、片づけしやすいよね」などと返答します。
相手が、「この机は重そうだね」と言ったとしたら、「机 重い」で検索して、「動かしにくい」「運びにくい」とデータを抽出し、「部屋の模様替えや、引っ越しのとき大変だよね」などと返答します。
もし、「机」に関する全ての情報を抽出しようとすると、色、形、重さ、大きさ、使いやすさ・・・などのあらゆる属性を抽出し、さらに、机の色が白なら、黒なら・・・、重ければ、軽ければ・・・と無限にデータを抽出することになりますが、現在の話題に限定すれば、無限のデータを検索する必要はなくなります。
抽出したデータからどれを選ぶかの基準は、感情などの認知パターンを基に選びます。
たとえば、「重い」→「運びにくい」→「不便」となれば、「不便」という認知パターンに合致するので、これを選ぶわけです。
「四角い机」といったデータが出てきても、合致する認知パターンがみつからなければ、次のデータに進みます。
このようにすれば、フレーム問題に陥ることなく、自然な会話が成立します。
おそらく、人間の頭の中でもこのように処理していると思います。
[…] シンボルグラウンディング問題(記号接地問題)が解決しました1 https://robomind.co.jp/symbolgroundingproblem/ […]
[…] 引用:https://robomind.co.jp/symbolgroundingproblem/ […]
[…] シンボルグラウンディング問題(記号接地問題)が解決しました1 https://robomind.co.jp/symbolgroundingproblem/ […]
> 無意識が
急に無意識が機械に生まれてて草
どうやって”意識”や”無意識”を機械に持たせるんでしょうか?
この論理だと、
機械を人間みたいにしたら全て解決だよ
と同じレベルだと思いますよ。
ふと様
コメントありがとうございます。
まさに、機械に意識を持たせることが、ロボマインドプロジェクトです。
機械に意識を持たせる方法は、以下の記事にかいていますので、ぜひ、順に読んでみてください。
ロボマインド・プロジェクトとは
「ロボットの心」を作るってどういうこと?
感情とは 認知パターンって何?
チューリング・テストと心の仕組み(心のエコシステム)
そもそも意識って何?人工知能で人工意識は作れるの?
主観と客観
3次元空間を認識するってどういうこと?
記憶って何?思い出ってどういうこと?
時間は現実には存在しない。時間は幻想。
意識の仮想世界仮説 -目の前に見えてる世界は全て幻想-
意識をプログラムで作るには
ロボマインド・プロジェクト システム概要
ロボットがプラネタリウムっていう概念を学習してたら
部屋の中で星が見える事も説明できます。
ぶっちゃけシンボルグラウンディング問題も解決してないから
タイトル詐欺も甚だしい
・意識/無意識、イメージデータ、概念データ、自主性、主体性云々
これらを作る事に非常に大きなコストがかかるから現実問題解決しないよね?
「解決策が分かりました!」と「解決しました!」は天と地ほど違うんです
さしあたって、現在の状況だけ計算するときにフレーム問題に直面しないのかが疑問だね!
ここで返答に無意識や常識を持ち出してくるなら
「それ」を現実的にどのように解決するのか明示していただきたい!
ぷち05様
コメント、ありがとうございます。
具体的な解決策は、研究開発ブログの最初の方に書いてありますよ。
「ロボマインド・プロジェクトとは?」
から
「動詞の意味はどうやって定義するの? 後編」
ぐらいまで読めばわかると思いますよ。
分らないとこがあれば、気軽に質問してくださいね。